Lower Limb Prosthetics
In-Progress Projects
A Pilot Clinical Trial to Assess the Effect of Transfemoral Socket Design on Hip Muscle Function
- Principal Investigator: Andrew Sawers, PhD, MSPO, University of Illinois at Chicago
- Co-Investigator/NU Site PI: Stefania Fatone, PhD, BPO(Hons)
- Study Staff: Ryan Caldwell, CP, FAAOP
- Collaborator: Scheck & Siress, Inc.
- Status: In Progress
- Acknowledgement: Department of Defense Awarding Office USAMRAA; Award number W81XWH19-1-0507. This study is conducted as an Interventional Clinical Trial and is registered with clinicaltrials.gov. The National Clinical Trials identifier number for this study is: NCT04212299.
The objective of the proposed pilot clinical trial is to assess the effect of socket design on residual limb hip muscle function in transfemoral prosthesis users. This proposal will also advance our understanding of residual limb hip muscle function in transfemoral prosthesis users, and its role in balance and mobility. Our central hypothesis is that socket design alters hip muscle function among unilateral transfemoral prosthesis users. To address this objective and central hypothesis, we propose to begin by assessing the following specific aims:
- Evaluate hip muscle function and its contribution to balance and mobility among unilateral transfemoral prosthesis users. We hypothesize that: i) the strength and endurance of hip muscles on the residual limb will be lower than on the intact limb, and of age- and sex-matched able-bodied persons, and ii) muscular strength and endurance will not differ between the intact limb and age- and sex-matched able-bodied persons.
- Test whether walking with a sub-ischial socket alters hip muscle function among unilateral transfemoral prosthesis users. We hypothesize that walking with a sub-ischial socket will: i) require different residual limb hip muscle activity than walking with an ischial containment socket, as evidenced by greater peak muscle activity, as well as altered onset and offset times, and ii) result in short- and long-term gains in residual limb hip muscle strength and endurance, as evidenced by an increase in average peak torque, rate of torque development, and resistance to fatigue.
Study Design
For Aim 1, we will conduct a cross-sectional study to evaluate residual and intact limb hip muscle function in transfemoral prosthesis users compared to able-bodied persons. All participants will be administered characterization measures, balance and mobility tests, as well as a series of procedures to evaluate hip muscle strength, endurance, and coordination. These measurements will serve as baseline for Aim 2. For Aim 2, we will conduct a pilot within-subjects prospective therapeutic clinic trial to assess if walking with a sub-ischial socket alters residual limb hip muscle function compared to an ischial containment socket. In Aim 2, a sub-set of participants from Aim 1 will have their existing ischial containment socket replaced with a sub-ischial socket. The same measures, tests, and procedures from Aim 1 will be administered in Aim 2 at two time points, eight and 42-weeks after sub-ischial socket fitting. Outcomes at these two time points will be compared to baseline (Aim 1) to evaluate short- and long-term changes in hip muscle function associated with walking in a sub-ischial socket. The Principal Investigator at the University of Illinois at Chicago will perform all testing, and the co-investigators at Northwestern University will complete all socket fabrication and fitting.
A Pilot Study to Evaluate the Effects of Hydraulic Ankle-Foot Prostheses on Standing and Walking in K2-Level Ambulators
- Principal Investigators: Sarah R. Chang, PhD and Steven A. Gard, PhD
- Co-Investigators: Paul Hammond, II; and Rebecca Stine, MS
- Collaborators: Jesse Brown VA Medical Hospital Motion Analysis Research Laboratory, a NU CORE Facility
- Funded by: American Orthotic & Prosthetic Association (AOPA)
- Status: In Progress
Project Goals
The purpose of this pilot study is to investigate how hydraulic damping and ankle range of motion affect walking on slopes and stairs, and balancing during standing in K2-level ambulators with unilateral, transtibial amputations. Medicare K-2 level classification refers to community ambulators who can traverse low-level environmental barriers such as curbs, stairs or uneven surfaces. This project will investigate the kinematics and kinetics of transtibial amputees as they perform different tasks with a HAF prosthesis compared to the non-hydraulic control prosthesis.
Hypotheses
We hypothesize that with the HAF prosthesis, toe clearance will be improved for level-ground walking and result in more physiologic kinematics and kinetics in both the sound and residual limbs when walking on slopes and stairs. We also hypothesize that trunk posture and weight distribution will be improved during static and perturbed standing balance.Data Collection
After obtaining IRB permission, subjects will be recruited, consented and randomly fitted with either the HAF or the control prosthesis. Prior to testing, subjects will wear each prosthesis for a two week accommodation period. After acclimating to each prosthesis, subjects will be tested and data will be collected during two visits to the Jesse Brown Department of Veterans Affairs Medical Center Motion Analysis Research Laboratory. Subjects will ambulate and stand under controlled conditions.Analysis
Participants’ capabilities will be measured and compared as they perform different tasks with the HAF prosthesis and a non-hydraulic prosthesis. Kinematic and kinetic data will be compared between HAF and control ankle-foot conditions, both within the individual subject’s and within the group of subjects’ datasets.
Impact and Future Research
This pilot study will indicate appropriate outcome measures and statistical analyses to compare the HAF prosthesis under investigation. Understanding biomechanics in unilateral, transtibial amputees while walking and standing on uneven terrains can better inform clinicians about appropriate prosthetic damping level prescriptions for K2-level ambulators. Moreover, this work may suggest improved designs for adaptable hydraulic damping ankle-foot prostheses and thereby improve mobility for individuals who live with a unilateral, transtibial amputation. Finally, the findings from this research can support future studies.
Characterizing the Gait Biomechanics of Women with Leg Amputation for Improving Evidence-Based Rehabilitation Practice
- Principal Investigator: Matthew J. Major, PhD
- Research Assistants/Graduate Students: Jessica Yohay, BS
- Clinical Faculty: Kristin Carnahan, MS, CPO
- Collaborators: Jesse Brown VA Medical Hospital Motion Analysis Research Laboratory, a NU CORE Facility; Rebecca Stine, MS
- Funded by: Women’s Health Research Institute and the 2019 Shaw Family Pioneer Awards.
- Status: In progress
To date, a systematic investigation on the effects of different heel heights and adjustable prosthetic feet on comfort, preference, and gait biomechanics of women with amputation has yet to be completed. It is essential to develop datasets that can guide the selection of adjustable feet for women prosthesis users and optimize prosthetic interventions to maximize ambulation safety and comfort.
In 2016, the National Institutes of Health (NIH) implemented a policy requiring investigators to consider sex as a biological variable (SABV) within their grant submissions and in 2017 the VA Clinical Practice Guidelines for Rehabilitation of Individuals with Lower Limb Amputation directed providers to “consider the patient’s birth sex and self-identified gender identity in developing individualized treatment plans”.
Evidence shows that women with amputations face rehabilitation challenges that are different than men. Overwhelmingly, men cohorts are convenience samples that dominate common research studies on rehabilitation outcomes and different prosthetic technology, thereby limiting generalizability and specific application to women.
Challenges in Footwear Choice
After a lower limb amputation, footwear perceived as appropriate is an important part of rehabilitation and community reintegration. Typically, women have more footwear options than men, with high heels a preferred part of many women’s attire. However, freedom of choice in footwear is limited for women prosthesis users.
Moreover, lower limb loss is known to alter gait biomechanics through compensatory mechanisms that can lead to secondary physical conditions. Thus, appropriate prosthetic prescriptions that optimize gait can help avoid chronic conditions.
The aims of this pilot study are to:
- Develop a better understanding of the interaction between footwear and heel height on the gait of women with lower limb loss.
- Generate data that will support future clinical studies.
Significance of SABV and Implications for Future Research
This pilot project contributes to a need for women-specific prosthetics research. Appropriate prosthetic prescriptions for women that optimize gait can help avoid chronic conditions, while greater variety in choice of footwear can improve quality of life after a lower limb amputation. This pilot study begins to address the critical need to advance rehabilitation practice for women with limb loss by generating data that will support future clinical studies.
Presentations
- Quinlan J, Carnahan K, Stine R, Kent J, Yohay J, Hansen A, Russell Esposito E, Major M (2020) Biomechanics of Women with Transtibial Limb Loss Walking with Heel Height Adjustable Feet. virtual 44th Meeting of the American Society of Biomechanics, August 4-7.
Related Publications
- Women’s Specific Footwear with Prosthetic Feet (2020) DOD – Congressionally Directed Medical Research Programs, June 2, 2020 issue.
Comparative Effectiveness of Socket Casting Methods: Improving Form and Fit
- Principal Investigator: Stefania Fatone, PhD, BPO(Hons)
- Co-Investigators: Andrew Hansen, PhD (MVAHCS); Andrea Cutti, PhD (INAIL)
- Collaborating Sites: Minneapolis VA Health Care System (MVAHCS); National Institute for Insurance against Accidents at Work (INAIL) [Instituto Nazionale per l’Assicurazione contro gli Infortuni sul Lavoro]
- Study Staff: Ryan Caldwell, CP, Kristin Carnahan, MSPO, CPO, Liridona Ashiku, BS (NUPOC); Gian Luca Migliore (prosthetist), Giovanni Osti (posthetist), Gianni Gregori (prosthetist) (INAIL); Amy Gravely, MA, John Looft, PhD, Kyle Barrons, CPO, Karl Koester, CP, Brian Arndt, CPO, Nicole Walker, CPO, Kierra Falbo, CPO, Juan Cave, CPO, Katherine Muschler (MVAHCS)
- Status: In Progress
- Acknowledgement: Department of Defense Awarding Office USAMRAA; Award number W81XWH1910835. This study is conducted as a Multi-Center Randomized Crossover Trial (RCT) and is registered with clinicaltrials.gov. Access the Comparative Effectiveness of Socket Casting Methods: Improving Form and Fit protocol.
One of the most important components of restoring function in persons with lower limb amputation is the precise fitting of the prosthetic socket to the residual limb. However, this is challenging because the residual limb is dynamic in shape and volume. Additionally, prosthetic socket fabrication processes influence socket fit. These processes typically consist of residual limb shape capture, positive mold rectification, initial diagnostic socket fitting, and definitive prosthesis delivery. The most prevalent residual limb shape capture method involves a negative wrap cast in a non-weight bearing position and manual manipulation of the cast to conform to the residual limb shape. With this technique it is challenging to accurately capture the bony contours and distribute pressure evenly around the residual limb. To improve shape capture, techniques that rely less on manual manipulation by the prosthetist, such as standing hydrostatic pressure casting with a water cylinder have been developed. Given the use of physics to shape the residual limb, it has been proposed that pressure casting results in better fitting and more comfortable sockets, however this has not yet been demonstrated.
Therefore the overall objective of this project is to compare hand casting to standing hydrostatic pressure casting using a water cylinder in persons with lower limb amputation. Our overall hypothesis is that standing hydrostatic pressure casting with a water cylinder will lead to more consistent and efficient residual limb shape capture and improved initial socket fit and comfort compared to hand casting.
- To compare the consistency of two residual limb shape capture techniques in persons with transtibial and transfemoral amputation.
- To compare the efficiency of two residual limb shape capture techniques in persons with transtibial and transfemoral amputation.
- To compare the outcomes of two residual limb shape capture techniques in persons with transtibial and transfemoral amputation.
Study Design
This will be a prospective, multi-site, assessor-blinded, randomized crossover comparative effectiveness clinical trial to assess initial socket fit and comfort achieved with two casting techniques: hand casting and standing hydrostatic pressure casting with a water cylinder. Subjects with lower limb amputation will act as their own controls.
Clinical Impact
This study will show whether standing hydrostatic pressure casting using a water cylinder offers a consistent and efficient alternative to conventional hand casting for prosthetic socket fabrication that results in a more comfortable socket “right out the gate”. Such evidence is needed to support the adoption of new technologies for persons living life with a lower limb amputation.
Related Information
- Cutti A, Osti G, Migliore G, Cardin D, Venturoli F, Verni G. (2018) Clinical Effectiveness of a Novel Hydrostatic Casting Method for Transfemoral Amputees: Results from the First 64 Patients. O&P News, October 31.
- Vigorso, le protesi per i reduci americani. Il resto del Carlino, Bologna, Italy, January 18, 2020.
Presentations
Cutti AG, Guiducci L, Raileanu IM, Frigo C, Franco A. (2021) SOCKETFACTORY: A Python software for 3D analysis of socket fabrication. American Orthotic and Prosthetic Association National Assembly, September 9-11, Boston, MA.
Design of a Smart Prosthetic Liner Controlled by Muscle Activation Feedback
- Principal Investigator: Steven A. Gard, PhD
- Co-Investigators: Noah Rosenblatt, PhD (Rosalind Franklin University); Farid Amirouche, PhD (University of Illinois-Chicago); Rebecca Stine, MS
- Clinical Faculty: Michael Cavanaugh, CPO
- Funded by: Department of Veterans Affairs (121RX002056-01A1)
- Status: In progress
Prosthetic comfort is rated as one of the most important issues faced by lower-limb amputees and is primarily dictated by fit and pressure at the residual limb/prosthetic socket interface. It is well established that socket fit and pressure can fluctuate throughout the day due to redistribution of fluids and associated volumetric changes within the residual limb. While these changes can be managed by donning or doffing socks, doing so will globally add or remove volume to the entire limb, which could negatively affect local interface pressures. Additionally, though, the pressure characteristics between the socket interface and the soft tissue of the residual limb may be dynamically affected by muscle activity during gait. While muscle activity of lower limb amputees is entrained to the gait cycle, the functional roles of this activity are not entirely clear. For example, while hip extensor and flexor muscles aid in moment production, prolonged activity during stance may be needed to stabilize the joint and maintain socket fit. Muscle activation patterns could also reflect control of dynamic socket pressures as muscle contractions alter the shape of the residual limb and socket pressure. However, the functional relationship between electromyography (EMG) signals of the residual limb in lower limb amputees and socket pressure is currently unknown.
The overall design concept is an instrumented prosthetic socket/residual limb interface (liner) that monitors intrasocket EMG and pressures to appropriately modulate pressures during ambulation so as to optimize comfort and function. We will monitor pressures along the surface of muscles within the prosthetic socket at locations neighboring EMG electrode placement. When the muscle contracts the volume of the nearby muscle and residuum tissue will also change leading to local variations in pressures between the socket and limb. The prototypical device is intended to respond to these changes. In response to EMG, we will inflate/deflate pockets of air that have been retrofit to the socket and aligned with the muscles. Pockets will inflate or deflate using small, lightweight compressors which will be controlled using simple on-board real-time logic. The prototype will demonstrate the ability to manipulate intrasocket pressure based on residual limb EMG.
This proposed study is the initial step in a line of investigations to create an intelligent socket interface (liner) that can modulate intrasocket pressure dynamically based on EMG and pressure. The long-term goal is to design a prosthesis that maximizes patient comfort and, in turn, movement performance and other associated aspects of health-related quality of life. After completion of the proposed work we expect to demonstrate that: 1) across a variety of walking speeds and across the duration of walking for multiple minutes a relationship exists between EMG and intrasocket pressure; 2) the relationship is affected by socket fit; 3) the relationship is independent of gait kinematics and kinetics, and 4) EMG provides unique information regarding comfort and it is possible to use this information to manipulate intrasocket pressure and maximize comfort during gait.
The proposed study is intended to lay the groundwork for a more complete understanding of the relationships among EMG, socket pressure and comfort. Creating a dynamic interface that improves socket comfort and reduces interface pressure would improve overall health of the residual limb by limiting daily limb volume fluctuation, tissue breakdown, blistering and reddening of the skin.
The Effect of Residuum-Socket Interface Integrity on Perception and Control in Individuals with a Transtibial Amputation
- Principal Investigators: Jenny Kent, PhD; Matthew Major, PhD
- Clinical Faculty: Kristin Carnahan, CPO; Ryan Caldwell, CP
- Study Staff: Julia Quinlan, PhD; Clare Severe, BSE; Brianna Wolin, BSE; Camille Guzman; Sailaja Bommareddy
- Status: In Progress, 8/1/2019-7/31/2021
- Funding Acknowledgement: American Orthotic & Prosthetic Association Research Award administered by the Center for Orthotics and Prosthetics Learning and Outcomes/Evidence-based Practice (EBP-053119)
A secure interface between the prosthetic socket and the residual limb is critical to enable the effective use of a lower limb prosthesis. Relative movement at this interface may limit the ability of the individual to obtain vital sensory information from interactions with the walking surface, and compromise positional awareness and control of the prosthesis. This is important given the high incidence of falls in lower limb prosthesis users. Vacuum Assisted Suspension (VAS) has been shown to reduce this relative movement (e.g. [2]), however direct evaluations of the functional implications of this improvement in interface integrity are lacking.
Aims and Hypotheses
The objective of this study is to explore the effect of improving, via vacuum, the coupling at the socket-residuum interface on 1) perceptual ability and 2) limb control of transtibial prosthesis users. This will be achieved through tests of vibration perception, proprioception, limb placement control and dynamic stability at increasing levels of vacuum.
This project seeks to evaluate whether increasing the level of vacuum will lead to improved coupling at the socket-residuum interface and will result in:
- Improved haptic perception via the prosthesis; and
- Improved ability to utilize and control the prosthesis during
a. Standing
b. Walking
Clinical Impact
It is anticipated that greater vacuum will improve the coupling between the prosthesis and the residual limb, enabling persons with a transtibial amputation to experience reduced vibration perception, more direct intentional movements toward fixed targets, less sway between visual conditions, and reduced step width variability. Results of this research may provide evidence that will inform clinicians’ prescription and configuration of vacuum assisted suspension systems.
References
- Miller et al. (2001) Arch Phys Med Rehabil. 82(8): 1031-1037.
- Darter et al. (2016) Prosthet Ortho Int. Oct; 40(5):552-7.
Presentations
- Kent Jenny A (2020) The Effect of Residuum-Socket Interface Integrity on Perception and Control in Individuals with a Transtibial Amputation. Virtual National Assembly of the American Orthotic & Prosthetic Association (AOPA), September 12.
Hybrid Electrical-Mechanical Pump for Vacuum Suspension of Prosthetic Sockets
- Northwestern University Principal Investigator: Stefania Fatone, PhD, BPO(Hons)
- VA Principal Investigator: Matthew Major, PhD
- Co-Investigators: Ryan Caldwell, CP, FAAOP; Andrew Hansen, PhD
- Consultant: R. J. Garrick, PhD
- Collaborating Sites: Jesse Brown VA Medical Center; Minneapolis VA Health Care System
- Status: In Progress
- Acknowledgement: Department of Veterans Affairs; Award number RX003090
Prosthetic sockets are secured to the residual limb by a variety of suspension mechanisms, including mechanical (straps, pin-locking liners) and suction (sealing sleeves, one-way valves, vacuum pumps) systems. Evidence strongly suggests that the benefits of vacuum-assisted suspension (VAS) over other suspension techniques include: reducing residual limb volume fluctuations that compromise socket fit, improving gait symmetry, reducing relative motion between the residual limb and socket, facilitating healing of residual limb wounds, and application to prosthesis users with short residual limbs.
Commercial pump designs are either mechanical or electrical, each having unique advantages and disadvantages. The Hybrid Integrated Pump Project Initiative (HIPPI) began in 2010 as part of a Department of Defense funded project and resulted in the design and patent of pump technology that incorporates mechanical and electrical systems to achieve VAS irrespective of the state of the user while maximizing battery life and minimizing noise. The first HIPPI prototype (Figure) underwent preliminary evaluation (Major et al., 2015) that demonstrated feasibility but highlighted the need for additional enhancements.
The purpose of this collaborative project is to further design and evaluate a hybrid prosthetic vacuum pump to enhance commercial viability.
This project has two aims with multiple parts:
- Refine the Hybrid Electrical-Mechanical Vacuum Pump Design.
- Optimize design of a diaphragm-based mechanical pump system.
- Parallel integration of an electrical system.
- Industrial design and user-centered market research for commercial viability; feedback and insights of end-users (prosthetists, prosthesis users) will be sought through focus groups.
- Bench and human subject testing of the HIPPI prototype.
- Bench testing.
- Human subject testing.
Most of the design and product development work of this project will be conducted at the Jesse Brown VA Medical Center and Minneapolis VA Health Care System. However, when it comes to development and use of new technologies in prosthetics, there is limited information on the needs and wants of end users. Hence, to ensure the design is clinically applicable, investigators at NUPOC will seek input from stakeholders by conducting focus groups with end-users, i.e., lower limb prosthesis users and prosthetists (Aim 1c).
Clinical Impact
This device will be of considerable value to persons with lower limb amputation by providing technology that applies to active patients who desire rapid generation of VAS with minimal battery recharging, and older patients who rely on sustained VAS without the need to repeatedly load their prosthesis. While our design has attracted interest from prosthetic manufacturers, design improvements must be made to enhance commercial viability and ensure efficacy of use in persons with amputation.
Patents
This hybrid pump is protected by the following patents: US9066822B2; US10806604B2; US9757255B2; US20150265435A1. Additional and related intellectual propertes are documented at Patents by Inventor Ryan J. Caldwell.
References
- Major, MJ, Caldwell R, Fatone S (2015). Evaluation of a prototype hybrid vacuum pump to provide vacuum-assisted suspension for above-knee prostheses. Journal of Medical Devices, 9, 0445041-445044.
No Longer Smooth: Introducing Striations into Prosthetic Socket Construction to Improve Suspension, Rotation, Fit and Comfort
- Principal Investigator: Stefania Fatone, PhD, BPO(Hons)
- Co-Investigators: Steven A. Gard, PhD; Rebecca Stine, MS; Marc Applebaum, MD (Jesse Brown VA Medical Center)
- Collaborators: Brad Poziembo, LP, Prosthetic Design Inc. (PDI); Tracy Slemker, CPO
- Project Director: Julia Quinlan, PhD
- Other Study Staff: Vasanth Subramanian, MS; Lilly Tran, MS; Jessica Yohay, BS; J. Chad Duncan, PhD, CPO
- Status: In Progress
- Acknowledgment: The U.S. Army Medical Research Acquisition Activity, 820 Chandler Street, Fort Detrick MD 21702-5014 is the awarding and administering acquisition office. This work is supported by the Office of the Assistant Secretary for Health Affairs, through the Neuromusculoskeletal Injuries Research Award under Award No. W81XWH-16-1-0485. Opinions, interpretations, conclusions and recommendations are those of the author and are not necessarily endorsed by the U.S. Department of Defense.
Conventional prosthetic sockets are typically smooth on the inner surface, which may cause the prosthesis to slide or rotate on the residual limb. The prosthetic sockets to be investigated for this study are textured on the inside and may prevent relative movement between the prosthesis and the residual limb. Hence, this study will investigate a new design in prosthetic socket that may be more comfortable and enable greater control by the prosthesis user.
Objective/Hypothesis
The objective of this pre-clinical research project is to investigate the effect of different types of inner surface texturing on the suspension, rotation, fit, and comfort of prosthetic sockets. We hypothesize that horizontal striations will improve suspension while vertical striations will help control transverse plane rotation. It is possible that in combination, both suspension and rotation may be improved. However, striations may vary in either direction in depth and pattern and it remains unknown what combinations might maximize suspension and rotation benefits without compromising fit, comfort and durability.
Study Design
This project will utilize an existing SQUIRT-Shape Rapid Prototyping System to construct sockets inexpensively with varying types of texturing.
Specific aims will:
- test the force needed to displace the socket longitudinally and rotationally
- test the coefficient of friction, tensile and static strength of sockets with different texturing patterns
- test the comfort and fit of textured sockets on Veterans with transtibial amputation
The first two aims use various bench-top tests to develop an understanding of the mechanical properties and potential benefits of textured sockets as compared to conventional smooth thermoformed sockets. The last aim will assess the socket fit and comfort of textured sockets that perform well in aims 1 and 2 on five Veterans with transtibial amputation in a randomized, double-blind, cross-over study.
Publications
- Quinlan J, Yohay J, Subramanian V, Poziembo B, Fatone S (2020) Using mechanical testing to assess the effect of lower-limb prosthetic socket texturing on longitudinal suspension. PLoS ONE 15(8): e0237841. https://doi.org/10.1371/journal.pone.0237841 (Research data associated with this publication is archived at https://digitalhub.northwestern.edu/collections/19673087-b6a5-4108-b285-9614aa8b6b95 )
- Quinlan J, Subramanian V, Yohay J, Poziembo B, Fatone S (2020) Using mechanical testing to assess texturing of prosthetic sockets to improve suspension in the transverse plane and reduce rotation. PLoS ONE 15(6): e0233148. https://doi.org/10.1371/journal.pone.0233148 (Research data associated with this publication is archived at https://digitalhub.northwestern.edu/collections/d50c6f56-2600-4e67-ba4f-ee681eeae64c )
- Quinlan J, Baer G, Subramanian V, Yohay J, Poziembo B, Richardson R, Fatone S. (2019) Tensile and Coefficient of Friction Testing of Textured Prosthetic Socket Specimens Provide Insights on Strength and Friction. Journal of Prosthetics and Orthotics, 31(S2):32.
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2018) Mechanical Testing of Textured Prosthetic Sockets Provides Insight on Improving Suspension. Journal of Prosthetics and Orthotics, 30(S2):39.
Presentations
2019
- Fatone S (2019) What We Have Learnt from Mechanical Testing of Textured 3D Printed Prosthetic Sockets Invited Presentation, AOPQ-AQIPA 2019 Congress, October 18-20, St-Hyacinthe, Quebec, Canada.
- Quinlan J, Subramanian V, Yohay J, Poziembo B, Fatone S (2019) Mechanical Testing of Textured Prosthetic Sockets. International Society for Prosthetics and Orthotics World Congress, October 5-8, Kobe, Hyogo, Japan.
- Quinlan J, Subramanian V, Yohay J, Poziembo B, Fatone S (2019) Mechanical Performance of Textured 3D Printed Prosthetic Sockets. American Orthotics and Prosthetics Association National Assembly, September 25-28, 2019, San Diego, California.
- Quinlan J, Subramanian V, Yohay J, Poziembo B, Fatone S (2019) What We Have Learnt from Mechanical Testing of Textured 3D Printed Prosthetic Sockets. Midwest Chapter of the American Academy of Orthotists and Prosthetists, September 13-14, Lake Geneva, Wisconsin.
- Quinlan J, Subramanian V, Yohay J, Baer G, Poziembo B, Fatone S (2019) Tensile and Coefficient of Friction Testing of Textured Socket Specimens. 2019 Current Research and Future Careers 7th annual symposium of the Northwestern Postdoctoral Association, Northwestern University, August 22, Chicago, IL.
- Quinlan J, Subramanian V, Yohay J, Baer G, Poziembo B, Fatone S. (2019) Tensile and Coefficient of Friction Testing of Textured Prosthetic Socket Specimens. 15th Annual Lewis Landsberg Research Day, April 4, Chicago, IL.
- Quinlan J, Baer G, Subramanian V, Yohay J, Poziembo B, Richardson R, Fatone S. (2019) Tensile and Coefficient of Friction Testing of Textured Prosthetic Socket Specimens Provide Insights on Strength and Friction. American Academy of Orthotists & Prosthetists Annual Meeting & Scientific Symposium, March 6-9, 2019, Orlando, FL.
- Quinlan, J (2019) BME Research Project: No Longer Smooth. 48th Annual Career Day for Girls, The Society of Women Engineers, Northwestern University Chapter, McCormick School of Engineering, February 23, Evanston, IL.
2018
- Quinlan J, Baer G, Subramanian V, Yohay J, Poziembo B, Richardson R, Fatone S (2018) Tensile and Coefficient of Friction Testing of Textured Prosthetic Socket Specimens. Midwest Chapter of the American Academy of Orthotists and Prosthetists, September 13-15, Lake Geneva, WI.
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2018) The effect of prosthetic socket texturing on socket suspension using mechanical loading 14th Annual Lewis Landsberg Research Day, Northwestern University, April 5, Chicago, IL.
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2018) “Mechanical Testing of Textured Prosthetic Sockets Provides Insight on Improving Suspension.” American Academy of Orthotists & Prosthetists Annual Meeting & Scientific Symposium, February 14-17, 2018, New Orleans, LA.
2017
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2017) The effect of prosthetic socket texturing on socket suspension using mechanical loading. Scheck & Siress Education Fest, April 27-28, Lombard, IL.
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2017) The effect of prosthetic socket texturing on socket suspension using mechanical loading. NUPOC Biennial Symposium for Initiative ’93, March 13, Chicago, IL.
- Quinlan J, Tran L, Yohay J, Poziembo B, Fatone S (2017) The effect of prosthetic socket texturing on socket suspension using mechanical loading. Midwest Chapter of the American Academy of Orthotists and Prosthetists, November 11, Chicago, IL.
Optimal Selection of Prosthetic Knee and Foot Combination for Improving Walking and Standing Performance in Transfemoral Prosthesis Users
- Principal Investigator: Steven A. Gard, PhD
- Co-Investigators: Rebecca Stine, MS; Matthew Major, PhD
- Clinical Faculty: Michael Cavanaugh, CPO
- Research Assistants/Graduate Students: Paul Hammond II, MS; Miguel Vaca Moran, MS
- Funding Acknowledgement: Department of Defense (DoD) OptAwarding Office, U.S. Army Medical Research Acquisition Activity (USAMRAA), Award Number W81XWH1910447
Numerous studies involving human subjects testing, mechanical characterizations and computer simulations have been conducted to compare different types of prosthetic foot/ankle mechanisms and knee joints in order to better understand their impact on prosthesis users’ activities of daily living. However, to date there have been no systematic investigations to determine how to best combine a prosthetic knee and foot for improving walking and standing performance in transfemoral prosthesis users. The specific clinical requirements for a transfemoral prosthesis that are affected by the prosthetic knee and foot functions involve achieving good stance phase stability to support the body while preserving momentum to facilitate efficient forward progression, and achieving sufficient toe clearance during swing phase to prevent a possible stumble or fall. This proposed study will evaluate both swing and stance phase functions of transfemoral prostheses by combining mechanical prosthetic knee and foot components that individually offer distinct and desirable advantages. The goal is to identify those prosthetic knee and foot combinations that impart greater benefits to the user than others.
Specific Aims and Hypotheses
This investigation will be limited to mechanical prosthetic components and will not include microprocessor-controlled devices. However, the principles that are explored can be universally applied to increase clinical understanding about fitting both mechanical and microprocessor-controlled prosthetic components. The purpose of this study is to systematically compare different combinations of mechanical prosthetic knee joint and foot-ankle components to determine how walking and standing performance are affected in transfemoral prosthesis users. This study will be conducted through a combination of human subjects testing and computer simulation. Therefore, the specific aims of this project are:
- To perform kinematic computer simulations of the transfemoral prosthesis with the different mechanical prosthetic knee and foot components. We will perform computer simulations of the transfemoral prosthesis configurations with the different combinations of mechanical prosthetic knee and ankle components to determine how swing phase foot clearance is affected and stance phase stability of the prosthetic knee joint is influenced.
- Hypothesis 1.1—The polycentric knee will improve stance phase stability and increase swing phase foot clearance compared to a single-axis knee unit.
- Hypothesis 1.2—A hydraulic foot-ankle component with increased ankle motion will provide a more optimal roll-over shape (i.e., prosthetic foot-ankle rocker radius) during stance and increase swing phase foot clearance compared with a non-articulated prosthetic foot.
- To systematically evaluate the walking performance of unilateral, transfemoral amputees using different combinations of mechanical prosthetic knees and feet. We will perform quantitative gait analyses on subjects walking on level ground, stairs and slopes with polycentric and single-axis knees, and hydraulic and solid foot-ankle components. Kinematic and kinetic data will be acquired in the motion analysis research laboratory.
- Hypothesis 2.1—We hypothesize that walking performance will be superior with the combination of the polycentric knee and hydraulic foot-ankle components.
- To systematically evaluate the standing balance performance of unilateral, transfemoral amputees using different combinations of mechanical prosthetic knees and feet. Standing balance of subjects will be evaluated using a series of tests that measure upright balance during quiet standing and stability following balance perturbation.
- Hypothesis 3.1—We hypothesize that subjects will have better performance on the balance assessments while wearing the polycentric knee and hydraulic foot-ankle components.
Clinical Implications
This work is directly applicable to the Veterans Health Administration’s Patient Care Mission because the results may improve the gait and quality of life of veterans with lower limb amputations. Additionally, the results from this study will contribute directly to the VA/DoD Clinical Practice Guidelines (CPG) for the rehabilitation of individuals with lower limb amputation.
Presentations
- Pace A, Howard D, Gard S, Major M (2020) A Simple Walking Model to Optimize Prosthetic Knee and Foot Combinations for Prosthetic Limb Stability. Virtual 44th Meeting of the American Society of Biomechanics, August 4-7.
Optimization of Prosthetic Foot and Ankle Stiffness for Standing and Walking
- Principal Investigator: Steven Gard, PhD
- Co-Investigators: Matthew Major, PhD; Rebecca Stine, MS; Marc Applebaum, MD
- Research Assistants/Graduate Students: Miguel Vaca Moran, MS; Thomas Curran, MS; Sarah Chang, PhD; Paul Hammond, II, MS
- Clinical Faculty: Michael Cavanaugh, CPO
- Funded by: Department of Veterans Affairs (101RX002107-01)
- Status: In Progress
Persons who walk with lower-limb prostheses are generally less efficient ambulators than able-bodied individuals (Waters et al., 1976) and their stability is compromised, attributable in part to deficiencies in the function of their prostheses (Gard & Fatone, 2004). Anatomical ankle joint stiffness in able-bodied persons adapts with walking speed (Hansen et al., 2004a) and for standing (Hansen & Wang, 2010). Therefore, walking efficiency and stability can be improved by fitting lower-limb amputees with prosthetic foot and ankle mechanisms that attempt to replicate corresponding anatomical functions (Hansen et al., 2004a,b, 2007, 2010).
We previously demonstrated that prosthetic ankle joints improve walking performance in persons with transtibial (below-knee) amputation (Su et al., 2007, 2008, 2010). In that study, research subjects clearly preferred walking with the prosthetic ankle components, but several indicated that they felt unstable during standing (Su et al., 2010). Subsequent analyses of those data indicated that the addition of a compliant prosthetic ankle unit significantly reduced the radius of the ankle-foot roll-over shape (Gard et al., 2011), which can adversely affect standing stability and gait performance (Gard & Childress, 2001; Klodd et al., 2010a,b).
Hypotheses
Compliant foot-ankle mechanisms that allow for a normal range of ankle joint motion during walking are expected to increase gait performance, but decrease standing stability. Conversely, a rigid foot-ankle combination will likely maximize standing stability, but decrease gait performance. Determination of an optimal prosthetic foot and ankle stiffness combination will require a compromise between the apparent disparate objectives for these two activities.
Project Goals
The purpose of this investigation is to determine how systematically varying the prosthetic foot keel stiffness and prosthetic ankle joint stiffness affects standing and walking in persons with unilateral, transtibial amputations. The specific aims for this study are:
- To determine how different combinations of prosthetic foot and ankle stiffness affect gait biomechanics of unilateral, transtibial prosthesis users. Kinematic, kinetic and energy expenditure data will be collected as subjects walk at different speeds and with different combinations of prosthetic foot and ankle stiffness.
- To determine how different combinations of prosthetic foot and ankle stiffness affect standing stability of unilateral, transtibial prosthesis users. Standing balance of subjects will be evaluated using a series of tests that measure balance and recovery stability as balance is perturbed.
Subjects will respond to questionnaires about their perceptions of comfort, exertion and stability while using the different prosthetic foot-ankle configurations.
Significance and Implications for Future Research
Increased understanding about how different prosthetic foot-ankle stiffness combinations affect standing and walking abilities will facilitate appropriate component selection by prosthetists, encourage development of prosthetic foot-ankle mechanisms with adaptable stiffness, and ultimately improve quality of life for prosthesis users.
References
- Gard, S.A. and Childress, D.S. (2001). What Determines the Vertical Displacement of the Body During Normal Walking? Journal of Prosthetics and Orthotics, 13(3), 64-67.
- Gard, S.A. and Fatone, S. (2004) Biomechanics of Lower Limb Function and Gait. Report of a Consensus Conference on the Orthotic Management of Stroke Patients, ISPO (International Society for Prosthetics and Orthotics), Copenhagen, Denmark, 55-61.
- Gard, S.A., Su, P.F., Lipschutz, R.D. and Hansen, A.H. (2011). Effect of Prosthetic Ankle Units on Roll-Over Shape Characteristics During Walking in Persons with Bilateral Transtibial Amputations. Journal of Rehabilitation Research & Development, 48(9), 1037-1047.
- Hansen, A.H., Childress, D.S., Miff, S.C., Gard, S.A. and Mesplay, K.P. (2004a). The Human Ankle During Walking: Implications for Design of Biomimetic Ankle Prostheses and Orthoses. Journal of Biomechanics, 37(10), 1467-1474.
- Hansen, A.H., Childress, D.S. and Knox, E.H. (2004b). Roll-over Shapes of Human Locomotor Systems: Effects of Walking Speed. Clinical Biomechanics, 19(4), 407-414.
- Hansen, A.H., Gard, S.A. and Childress, D.S. (2007). Quasi-Stiffness of the Ankle During Able-Bodied Walking at Different Speeds: Implications for Design of Prostheses. Foot and Ankle Motion Analysis: Clinical Treatment and Technology, CRC Press, Boca Raton, FL, pp. 599-612.
- Hansen, A.H., Miff, S.C., Childress, D.S., Gard, S.A., and Meier, M.R. (2010). Net External Energy of the Biologic and Prosthetic Ankle during Gait Initiation. Gait & Posture, 31, 13-17.
- Hansen, AH & Wang, CC. (2010). Effective rocker shapes used by able-bodied persons for walking and fore-aft swaying: implications for design of ankle-foot prostheses. Gait & Posture. 32(2):181-4.
- Klodd E, Hansen A, Fatone S, Edwards M. (2010a). Effects of prosthetic foot forefoot flexibility on oxygen cost and subjective preference rankings of unilateral transtibial prosthesis users Journal of Rehabilitation Research & Development, 47(6):543-52.
- Klodd E, Hansen A, Fatone S, Edwards M. (2010b). Effects of prosthetic foot forefoot flexibility on gait of unilateral transtibial prosthesis users. Journal of Rehabilitation Research & Development, 47(9):899-910.
- Su, P., Gard, S.A., Lipschutz, R.D. and Kuiken, T.A. (2007). Gait Characteristics of Persons with Bilateral Transtibial Amputations. Journal of Rehabilitation Research & Development, 44(4), 491-502.
- Su, P., Gard, S.A., Lipschutz, R.D. and Kuiken, T.A. (2008). Differences in Gait Characteristics Between Persons with Bilateral Transtibial Amputations, Due to Peripheral Vascular Disease and Trauma, and Able-bodied Ambulators. Archives of Physical Medicine and Rehabilitation, 89(7), 1386-1394.
- Su, P., Gard, S.A., Lipschutz, R.D. and Kuiken, T.A. (2010). The Effects of Increased Prosthetic Ankle Motions on the Gait of Persons with Bilateral Transtibial Amputations. American Journal of Physical Medicine and Rehabilitation, 89(1), 34–47.
- Waters, R.L., Perry, J., Antonelli, D., and Hislop, H. (1976). Energy Cost of Walking of Amputees: The Influence of Level of Amputation. The Journal of Bone and Joint Surgery, 58-A(1), 42-46.
Publications
- Vaca Moran, Miguel Angel (2019). The Effect of Systematically Varying the Prosthetic Foot Keel and Ankle Joint Stiffness on Standing and Walking in Persons with Unilateral Transtibial Amputations. Master's Thesis, Biomedical Engineering, Northwestern University. (See Abstract, The Effect of Systematically Varying the Prosthetic Foot Keel and Ankle Joint Stiffness on Standing and Walking in Persons with Unilateral Transtibial Amputations (2019))
- Curran, Thomas (2016) The Effects of Foot-Ankle Components on the Mechanical Properties of Dynamic Response Prosthetic Feet. Master of Science Thesis, Biomedical Engineering, Northwestern University.
Presentations
- Chang SR, Major MJ, Gard SA (2018) Mechanical characterization of prosthetic feet to predict effective ankle joint stiffness. Presented at the 44th American Academy of Orthotists & Prosthetists Annual Meeting & Scientific Symposium, New Orleans, LA, February 14-17.
- Vaca M, Gard SA, Stine R (2019) The Effect of Prosthetic Foot and Ankle Stiffness Changes on Gait and Standing in People with Unilateral Transtibial Amputations. BME Research Day, Northwestern University, Chicago, May 16.
Completed Projects
A Comparison of Computer-Controlled and Passive Prosthetic Knee Joints
- Steven A. Gard, PhD and Dudley S. Childress, PhD, Principal Investigators
- Margrit R. Meier, PhD, Project Director
- Funded by: Department of Veterans Affairs (DVA)
- Status: Completed
The purpose of this study is to evaluate walking performance (level ground, obstacle course, stairs) of persons with unilateral transfemoral amputations when fitted with three different prosthetic knee joints: Otto Bock C-leg®, Otto Bock 3R60 and CaTech SNS.
Objective evidence is needed to determine if significant benefit is derived when prescribing expensive microprocessor-controlled knee mechanisms over the high-performance passive knee units that cost significantly less. Most previous studies have analyzed microprocessor-controlled knee joints primarily during walking on level, smooth surfaces, although the appeal of these knee mechanisms seems to be in their excellent stance stability and enhanced swing phase responsiveness on uneven surfaces. Gauthier-Gagnon et al. (1999) found that the activities most often reported by their amputee population as ones that could not be performed using conventional knee units were ascending and descending stairs without handrails, and walking outdoors on uneven grounds and in inclement weather. We therefore tested the C-leg® in those specific areas where the manufacturers claim that it provides unique benefit to the prosthetic user: Ease of walking over uneven ground due to stumble control, ascent and descent of stairs and reduction of mental loading. Testing of the C-leg® on the basis of an obstacle course with different surfaces in combination with a mental loading test should demonstrate the benefits of the C-leg's® new design. The results of our study will contribute to a better understanding of microprocessor-controlled prosthetic knee joint systems and may ultimately lead to better prescription criteria.
Methodology
The testing session consists of (1) a gait analysis on level ground at three different walking speeds (normal, as slow as possible and as fast as possible) without and with a mental loading task, (2) completing an obstacle course (see figure 2), without and with a mental loading task, and (3) stair ascent and descent, again without and with a mental loading task. The mental loading task consisted of a counting task in which the participants are requested to count vocally backwards in three-step increments (e.g., 100, 97, 94 etc.). At each of the different speeds, on the obstacle course and for the stairs, different starting numbers were given to avoid repetition. During the entire testing session heart rate is monitored to estimate the energy expenditure by using the Total Heart Beat Index (Hood et al., 2002).
The study is near completion and data are being processed and analyzed. The publications to date are based on preliminary results and their conclusion may therefore change once the entire data analysis is completed.
References
- Gauthier-Gagnon C, Grise MC, Potvin D. Enabling factors related to prosthetic use by people with transtibial and transfemoral amputation. Archives of Physical Medicine & Rehabilitation 1999;80:706 –713.
- Hood VL, Granat MH, Maxwell DJ and Hasler JP. A new method of using heart rate to represent energy expenditure: the Total Heart Beat Index. Archives of Physical Medicine & Rehabilitation 2002; 83(9):1266-73.
Related Publications
- Meier M, Hansen A, Gard S. Does mental loading change the energy expenditure during level walking? A comparison between C-leg, SNS and 3R60. Paper presented at: Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists; March 1-4, 2006; Chicago, IL.
- Meier M, Hansen A, Gard S, Childress D. Obstacle Course Performance: Comparison of the C-Leg to Two Conventional Knees. Paper presented at: 20th Congress of the International Society of Biomechanics and 29th Annual Meeting of the American Society of Biomechanics 2005; Cleveland, OH.
- Meier, Margrit R., "Performance on an obstacle course: Otto Bock C-leg vs. Otto Bock 3R60 vs. CaTech SNS," ** American Academy of Orthotists and Prosthetists AAOP 2005 Annual Meeting and Scientific Symposium, Orlando, Florida, USA, March 16-19, 2005.
- Meier, Margrit R., "A comparison of C-leg and 3R60 prosthetic knee joint performance," ** 27th Annual Meeting of the American Society of Biomechanics (ASB), Toledo, Ohio, USA, September 25-27, 2003.
- Meier, Margrit R., "A comparison of the C-leg and the 3R60 prosthetic knee joint," ** Biomechanics of the lower limb in health, disease and rehabilitation, Salford-Manchester, UK, September 1-3rd, 2003.
(** These documents are in the Adobe PDF format. You will need the Adobe Reader, which is available for FREE, to view these documents.)
A Quantitative Analysis of Transfemoral Prosthetic Alignment
- Principal Investigator: Steven Gard, PhD
- Project Director: Sara Koehler, MS
- Funded by: Department of Veterans Affairs Rehabilitation Research and Development, Grant Number A7115R
- Status: Completed
The purpose of this project is to examine relationships between prosthetic alignment in transfemoral amputees and how they control their prosthetic knee. Prosthetic alignment is important to the successful rehabilitation of lower-limb amputees and is a deciding factor in whether the prosthetic limb will restore function, minimize gait deviations, and be comfortable for the user. To improve the process of transfemoral alignment and promote an objective basis for practice, researchers and clinicians must first acquire a better understanding of the relationship between variations in prosthetic alignment and the biomechanical response of the amputee. The purpose of this study is to evaluate how gait biomechanics of persons with unilateral, transfemoral amputations are altered in response to systematic changes in sagittal-plane alignment. Both linear translations of the prosthetic knee and rotations of the prosthetic foot will be investigated during straight, level walking. To measure the response of transfemoral amputees to variations in sagittal-plane alignment, researchers will collect kinematic and kinetic data using quantitative gait analysis; and also will acquire EMG data of hip musculature, intrasocket contact pressure, and energy expenditure measurements. This work will characterize the relationship between prosthetic misalignment and the functional response of transfemoral amputee gait, including biomechanical asymmetries, increased energy expenditure, and residual limb pain. The results of this study will provide an understanding of how transfemoral amputees control their prosthetic knee joint and may establish a more systematic approach to the process of clinical prosthetic alignment.
Related Presentations and Publications
- Koehler S. (2009) "An Investigation of Shock-Absorbing Components in Persons with Unilateral Transfemoral Amputation." Midwest Chapter American Academy of Orthotists and Prosthetists (AAOP) 2009 Annual Fall Session, Hickory Hills, IL, November 7.
- Koehler S, Lipschutz R, Stine R, Gard S. The effect of transfemoral prosthesis alignment perturbations on gait in 38th American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Symposium. March 21-24, 2012. Atlanta GA.
- Koehler, Sara Rebecca. (2012) "Neuromechanical Mechanisms of Prosthetic Knee Joint Control: Associations with Prosthetic Alignment", Doctoral Dissertation, Biomedical Engineering, Northwestern University.
- Koehler SR, Dhaher YY, Hansen AH. (2014) Cross-validation of a portable, six-degree-of-freedom load cell for use in lower-limb prosthetics research. J Biomech, 47(6), 1542-1547.
- Koehler S, Lipschutz R and Gard SA. (2015, accepted for publication). The Biomechanical Response of Persons with Transfemoral Amputation to Variations in Prosthetic Knee Alignment during Level Walking. Journal of Rehabilitation Research & Development.
An Investigation of Shock-Absorbing Prosthetic Components
- Principle Investigators: Steven A. Gard, PhD, and Dudley S. Childress, PhD
- Student Investigator: Sara R. Koehler, MS
- Co-Investigators: Margrit R. Meier, PhD, and Rebecca Stine, MS
- Funded by: Department of Veterans Affairs (DVA)
- Status: Completed
One of the primary functions of the locomotor unit is to minimize impact forces exerted on the body during the loading response phase of gait (Ref 1). The lower limb manages these forces through a combination of anatomical shock absorbers, which include soft tissue compression of the heel and relative joint motion at the ankle, knee, hip, and pelvis. However, persons with transfemoral amputations lack many of these anatomical shock absorbers and, despite slower walking speeds, may be susceptible to gait deviations and higher impact forces on their intact limb and on their prosthetic side at joints proximal to their amputation (Refs 2-4). To address this issue, shock-absorbing components (SAC) have been designed to decrease the overall stiffness of the prosthetic limb. The purpose of this study was to compare the effect of a shock-absorbing pylon (SAP) to a stance flexion knee unit on the gait of ten transfemoral amputees. We were particularly interested in relating perceptions of increased comfort with changes in quantitative gait data associated with shock absorption and walking performance. Ideally, the results from this study will help establish guidelines for prosthetists who fit these components on persons with transfemoral amputations and guide innovations for future SAC designs.
Methodology
The experimental protocol for this study consisted of three gait evaluations in which subjects walked with their conventional prosthesis (baseline), a SAP (Endolite TT Pylon), and a stance flexion knee unit (Otto Bock 3R60 EBS Knee). During each gait evaluation, subjects were asked to walk over a range of five self-selected speeds. Subjects were also asked to complete an in-house questionnaire that addressed their perceptions of comfort with each SAC.
References
- Perry J. Gait Analysis: Normal and Pathological Function. Thorofare, NJ: SLACK Inc., 1992.
- Voloshin A, et al. Force wave transmission through the human locomotor system. J Biomech Eng 1981; 103:1: 48-50.
- Snyder RD, et al. The effect of five prosthetic feet on the gait and loading of the sound limb in dysvascular below-knee amputees. J Rehabil Res Dev 1995; 32:4: 309-15.
- Ratcliffe RJ, Holt KG. Low frequency shock absorption in human walking. Gait & Posture 1997; 5:93-100.
Related Publications
- Koehler, S.R., Gard, S.A., Meier, M.R., Cassar, M., Lipschutz, R. "Stance-Phase Knee Flexion in Persons with Unilateral Transfemoral Amputations Walking on an Otto Bock 3R60 EBS Knee: A Preliminary Report." 9th Annual Meeting, Gait & Clinical Movement Analysis Society, April 21-24, Lexington, KY, USA, 2004.
- Koehler, S.R., Gard, S.A., Meier, M.R. "An Investigation of Shock-Absorbing Components in Persons with Unilateral Transfemoral Amputations." 11th World Congress, International Society for Prosthetics & Orthotics, August 1-6, Hong Kong, 2004.
- Koehler, S.R., Gard, S.A., Meier, M.R. "An Investigation of Shock-Absorbing Components in Persons with Unilateral Transfemoral Amputations." 31st Annual Meeting, The American Academy of Orthotists and Prosthetists (AAOP) and The Association of Children's Prosthetic-Orthotic Clinics (ACPOC), March 16-19, Orlando, FL, USA, 2005.
- Koehler, S.R., Gard, S.A., Meier, M.R. "The Effect of Shock-Absorbing Prosthetic Components on Ground Reaction Force Profiles in Persons with Transfemoral Amputations." 10th Annual Meeting, Gait & Clinical Movement Analysis Society, April 6-9, Portland, OR, USA, 2005.
Assessing and Responding to the Prosthetics Needs of Farmers and Ranchers
- Co-Investigators: Stefania Fatone, PhD, Steven A. Gard, PhD, Kathryn Waldera, MS
- Students/Interns: Margaret Parker, MS, Elisah Pietersma, BS
- Project Director: Craig Heckathorne, MS
- Collaborators: The National AgrAbility Project
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
Farming and ranching are important occupations in the United States, offering many people both valuable employment and a satisfying life style. However, these occupations also expose workers to many dangers. In 2012, the U.S. Bureau of Labor Statistics ranked farming and ranching as having the 9th highest fatality rate of U.S. occupational categories with the 2nd highest number of fatalities in that year. Generally, in occupations with many fatalities, there also are many more non-fatal injuries. The National Safety Council reported that among persons employed in agriculture "one out of every ten of these workers will suffer an amputation while on the job" (Kircher 2003). Many of these amputations will involve part or all of a finger or toe, but it is estimated that 5 to 6 percent (about 1 out of every 200 agricultural workers) will have a major limb amputation involving complete loss of a hand or foot or more of a limb (Brown 2003).
Many farmers and ranchers with major limb amputation are geographically isolated, working in remote settings far from prosthetic clinics. Farmers and ranchers have unique needs that often are not met by standard prosthetic devices. Furthermore, farmers and ranchers who use prostheses are at risk of experiencing secondary injuries due to falls, prosthetic entanglement, overuse injury to the intact limbs, and injuries to the residual limb (Wilkomm and Novak 2007). Lacking are objective data and rigorous engineering analyses of components that could explain why prosthetic devices are not meeting the needs of farmers and ranchers with amputations.
Purpose
The ultimate goals of this project are to promote appropriate application of prosthetic components for farmers and ranchers; to reduce prosthetic device failure and resultant secondary injuries; and to suggest improved prosthetic designs.
Specific Objectives
- Identify activities where prosthetic devices either help or hinder farm-related activities by surveying farmers and ranchers with amputations and the prosthetists who provide services to them.
- Promote appropriate clinical designs by developing educational materials and tutorials for prosthetists who work with farmers and ranchers.
- Improve the design of prosthetic componentry by analyzing failed devices, identifying specific deficiencies and/or needs, and engaging in development projects.
Progress
The first objective was addressed through a two-stage process. The first stage involved a series of telephone and in-person interviews to define prosthetic issues pertinent to farmers and ranchers. The results of these interviews were reported in the journal Disability and Rehabilitation: Assistive Technology (Waldera et al. 2012. Copy and paste this link into your browser: http://www.ncbi.nlm.nih.gov/pubmed/22779443) and in a webinar, Prosthetics for Farmers and Ranchers: What Is Used and What is Needed, available on the website of the National AgrAbility Project (Heckathorne et al. 2012). Issues explored in the interviews included current and past prostheses used, prosthetic failures, and the ability to complete farm tasks using a prosthesis. Prosthetists who provide services to this population were also interviewed to gain knowledge of specific devices and practices used in their geographic region.
Interviews with 40 farmers (in 12 states) and 26 prosthetists (in 14 states) revealed several common themes related to prostheses and their use.
The interviews confirmed that farmers and ranchers with amputations have prosthetic needs distinct from the needs of the general population. Also, it was clear that post-amputation farming or ranching can be facilitated by creating more durable, affordable, and adaptable prosthetic components.
The interview results guided the second stage: the design of two surveys, one specifically for farmers and ranchers with upper-limb amputations and another for those with lower-limb amputations. The objective of these surveys was to obtain more specific information about the concerns of farmers and ranchers with limb amputations in order to establish priorities for improvements. The surveys also provided an opportunity to increase the representation of different types and levels of amputation, different farming and livestock operations, and additional geographic regions. The surveys were available online and in print format.
The survey was conducted from February 2013 through March 2014. During that time, 27 farmers and ranchers completed the survey online and one farmer completed a paper survey. Of the 28 respondents, 20 identified themselves as farmers, 7 as ranchers, and one as an agricultural worker. Fourteen of the 28 had upper-limb amputations and fourteen had lower-limb amputations. Using photographs incorporated in the survey, respondents identified the types of prosthetic components and systems they were using. Also, using a four-point scale from "not a problem" to a "very big problem", respondents rated a variety of factors related to problems they experienced with their prostheses. These included design factors (of the prosthesis), functional factors (how the prosthesis performed in farm and ranch work), service factors (service provided by prosthetists), and cost factors (including direct costs of purchasing the prosthesis and paying for repairs and indirect costs that affected productivity).
The survey results were organized into a webinar intended to inform prosthetists about the prosthetic needs of agricultural workers with amputations. The webinar, “Prostheses for Farmers and Ranchers: What Is Used, What Is Needed” (2014), is available to view free of charge (or with a fee to receive Continuing Education Credit if desired) on the Paul E. Leimkuehler Online Learning Center. (Accessibility Option: This webinar is accessible to individuals with a hearing impairment. Downloading the PowerPoint file using the “Resource Link” at the top right corner of the streaming video enables slide views that show transcription of the narrator's oral presentation in the Notes pane.) This webinar addresses our second objective, education. Content focuses on the types of prostheses used by farmers and ranchers in their work and the problems they encountered. Topics include respondents’ specific components, device construction, durability, maintainability, ease of cleaning and decontaminating, use in adverse weather conditions, prosthetic services, and ranking in order of importance the problems they identified.
Our third objective was to develop ideas to improve prosthetic components. We planned to acquire and analyze failed components obtained from farmers and ranchers. However, collection of failed components proved to be impractical because farmers wanted to keep their parts as spares for future use; had repaired the damaged parts by themselves; or had left the failed parts with their prosthetist to make repairs.
Unable to acquire failed components, we shifted our developmental focus to a prevalent problem identified by farmers and ranchers in both the interviews and the survey, namely heat and perspiration buildup in the prosthetic socket during summer months. Agricultural workers routinely remove their prosthesis several times a day to alleviate the discomfort from heat and sweat and to dry the socket and limb, thus preventing injury to the skin of the residual limb. Having to remove their prosthesis interrupted their work and reduced their productivity.
We reviewed empirical designs for alternative frame-type sockets that could improve heat and moisture dissipation. We developed a conceptual procedure for designing and fabricating a frame-type transradial socket based on pressure measurements at the socket-limb interface and measurements of the heat dissipation characteristics of the frame.
Clinical Implications
The information gathered during this project can impact the design of prostheses for agricultural workers and the way prosthetic services may be tailored to the particular work and life requirements of this population. Areas for future work include the development of prostheses that are more durable, less costly, and more maintainable by the farmer or rancher. It was clear that far more robust and functional prostheses are needed in particular for persons with arm amputations proximal to the elbow, the majority of whom generally choose not to use prostheses while continuing to farm or ranch. Developments in these areas also may benefit persons with amputations who work in other physically demanding occupations such as construction, forestry, mining, and manufacturing. Such improvements may also serve the physical demands of soldiers with amputations who are deployed in combat situations. Furthermore, new developments that address common concerns can be transferred to all prosthesis users.
References
- Bureau of Labor Statistics (2012). National Census of Fatal Occupational Injuries in 2011 (Preliminary Results). USDL-12-1888. News Release, September 20, 2012.
- Brown J. (2003). Amputations: A Continuing Workplace Hazard. http://www.bls.gov/opub/mlr/cwc/amputations-a-continuing-workplace-hazard.pdf. Access Date: 03/21/12.
- Kircher R. (2003). Farming with an Arm Amputation, Oklahoma AgrAbility Newsletter, 2(2):1-8.
- Wilkomm T and Novak M. (2007). Assistive Technology and Secondary Injuries Experienced by Farmers, Proceedings of the RESNA Annual Conference, Phoenix, AZ, June 15-19.
Related Presentations and Publications
- Waldera K. (2009). Improving Prosthetic Options for Farmers and Ranchers: NU RERC Collaboration with the National AgrAbility Project. Midwest Chapter American Academy of Orthotists and Prosthetists (AAOP) Annual Summer Session, Lake Geneva, WI, June 12-13.
- Waldera KE and Heckathorne CW. (2009). Assessing and Responding to the Prosthetic Needs of Farmers and Ranchers. Presented at the AgrAbility National Training Workshop, Grand Rapids, MI, October 5-8.
- Waldera K and Heckathorne C. (2010). Utilization of Lower-limb and Upper-limb Prostheses by Farmers and Ranchers in the U.S. 13th ISPO World Congress; May 10-15; Leipzig, Germany.
- Heckathorne C and Waldera K. (2011). The Prosthetic Needs of Farmers and Ranchers with Upper-limb Amputations. MEC '11 Symposium; August 17-19; University of New Brunswick.
- Waldera K, Heckathorne CW, Parker M, Fatone S. (2012). Assessing the Needs of Farmers with Amputation. The 38th American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Symposium. March 21-24; Atlanta GA.
- Waldera KE, Heckathorne CW, Parker M, Fatone S. (2012). Assessing the prosthetic needs of farmers and ranchers with amputations. Disability and Rehabilitation: Assistive Technology, 8(3): 204-212, http://www.ncbi.nlm.nih.gov/pubmed/?term=waldera
- Murphy C. (2012). Prosthetic Limbs Inadequate for Farmer, Rancher Use. O&P Business News, 21(10): 31-32.
- Heckathorne C. (2012). Prosthetics for Farmers and Ranchers: What Is Used and What Is Needed. Webinar for the National AgrAbility Project Virtual National Training Workshop, November 27-29.
(Available at: http://agrability.org/Online-Training/archived/2012virtualntw.cfm.) - Waldera K, Heckathorne C, Parker M, Fatone S. (2013). Assessing the Prosthetics Needs of Farmers and Ranchers in the USA: Interview Results. The 14th World Congress of the International Society of Prosthetics and Orthotics, February 4-7, Hyderabad, India.
- Heckathorne C. (2013). Prostheses in Physically Demanding Work. O&P Edge, 12(10):96.
- Craig Heckathorne was interviewed on RFD Radio Network morning program with Alan Jarand and Rita Frazer on 11/21/13.
- Eveleth R (2014) The Future of Farmer Prosthetics. Modern Farmer, January 2, 2014.
http://modernfarmer.com/2014/01/future-farmer-prosthetics/. - Beilharz N (2014) Farmers struggle with prosthetic limbs. ABC Rural Radio, South Australia Country Hour, aired on January 30, 2014. http://www.abc.net.au/news/2014-01-30/prosthetic-farming/5228084. Listen to the hour long program at http://www.abc.net.au/news/2014-01-30/sa-country-hour-30-january/5228064.
- Eveleth R (2014) When State-of-the-Art is Second Best. NovaNEXT, March 5, 2014. http://www.pbs.org/wgbh/nova/next/tech/durable-prostheses/?utm_source=facebook&utm_medium=pbsofficial&utm_campaign=nova_next
- Heckathorne C, Waldera K, Parker M, Fatone S and Gard S (2014). Prostheses: What do Farmers and Ranchers Use; What do They Want? Webinar for the National AgrAbility Project Virtual National Training Workshop, December 2-4. (Available at: http://agrability.org/Online-Training/virtualntw/index.cfm)
- Prosthetics and Agriculture: A Marriage of Necessity. AgrAbility Harvest, 2015:6(1)2-3.
- Stefania Fatone was interviewed by Kristoff Husted for KBIA Mid-Missouri Public Radio. "Amputee Farmers Struggle with Available Prosthetics" aired on 6/3/2015.
- NARIC, News and Notes from the NIDILRR Community and Beyond picked up the KBIA radio interview that aired on 6/3/2015, "Farmers with Prosthetics Face Durability Challenges", and disseminated the link on June 17, 2015.
Characterization of the Shock Absorption of the Able-bodied Locomotor System with Application to Amputee Gait
- Dudley S. Childress, PhD and Steven A. Gard, PhD, Principal Investigators
- George A. Bertos, MS, Project Director
- Co-Investigators: Andrew H. Hansen, PhD; Margrit R. Meier, PhD; Edward C. Grahn; Rebecca L. Stine, MS; and Dilip Thaker
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
Purpose
During walking, persons with lower-limb amputation experience high forces that are transmitted through their prostheses to their trunk. These shock forces are not only uncomfortable and unhealthy for the amputee but may also contribute negatively to the quality of gait. We believe shock absorption is a fundamental aspect of normal and pathological walking which if not set properly can result in poor and injurious gait. We believe that the current prostheses and orthoses of the market may not supply the right shock absorption to the persons who walk with them. One of the reasons for this inadequate shock absorption supply is that there is no clear understanding of how shock absorption is really achieved during normal walking nor how it can be achieved for those who are lacking it.
The purpose of the project is therefore to investigate shock absorption during normal and amputee walking using engineering analysis, models and experiments. The acquired theoretical knowledge of these investigations may lead to the ultimate project goal of designing and prototype testing of new prosthetic devices that are based on this gained knowledge. New shock-absorbing devices could improve the users' comfort and gait, thus would be beneficial to the user community. The gained theoretical understanding will contribute to the science of prosthetics and thus advances our understanding of an important aspect of gait.
We hypothesize that walking may be improved during prosthetic gait (higher force attenuation, higher walking velocities) if proper mechanical impedance characteristics of the prosthesis/residual limb complex are achieved. By "proper mechanical impedance characteristics" we mean characteristics similar to the mechanical impedance characteristics of the able-bodied leg complex (locomotor system) during normal walking. We assume that the impedance characteristics of normal walking are the optimal for the task of human walking in general, normal or prosthetic. Thus we need to systematically characterize the mechanical impedance during able-bodied walking.
Development Project
Current prostheses cannot automatically change their impedance characteristics. We believe the prostheses' impedance characteristics should change with walking speed (cadence) similar to that of the natural leg during normal walking. Thus, the mechanical impedance of a trans-femoral prosthetic leg (prosthesis plus residual limb) should be designed that it can vary with walking speed. The aim is that the total mechanical impedance of a trans-femoral prosthetic leg is approximately equal to the mechanical impedance of an able-bodied leg during walking.
Methodology
Gait analysis of able-bodied subjects will be performed to properly characterize the mechanical impedance of non-pathological gait. The characterization of the mechanical impedance of amputee gait will be gained through gait analysis of persons with unilateral transfemoral amputation as well as through persons with bilateral transfemoral amputation. All three groups will walk at their normal selected walking speed, their slowest walking speed and their fastest walking speed.
Modeling
In order to characterize the vertical mechanical impedance of the locomotor system of each of the subjects we assume a second order model [1] (see figure 1), for the unknown shock absorption mechanism. Based on the kinematic data we create the vertical path of a rocker-based inverted pendulum model without shock absorption present (terrain yb) and use this as the input to our identification method. The output of the identification method is the vertical BCOM trajectory, ym, (which contains all shock absorption mechanisms). The identification method estimates the values of the second order system matching the estimated output to the given output as close as possible.
Validation of the Model
After having characterized the able-bodied mechanical impedance and the mechanical impedance of the person with bilateral amputation the compensatory prosthesis will be calculated. If the compensatory prosthesis is connected in series with the bilateral amputee's locomotor system, then her or his total system will approximate the able-bodied system. We will validate the identification method used with simulations and a mechanical model, the "walking wheel" (see figure 2).
Results
For one able bodied subject [1], the fitting of the model to the data was satisfactory. The Variance Accounted For (VAF), an indicator of the fit of a model, ranged from 75-80% for low speeds to 90-95% for normal and fast speeds. Our results support the theory that the damping ratio z = [B/2(Mek)1/2] is fairly constant (z = 0.4 - 0.7) across different walking speeds. Stiffness k appears to increase linearly with walking speed (r2=0.95), being around 6 kN/m at 1.2 m/sec. Damping B appears to increase with the square root of walking speed, (r2=0.75). During able-bodied walking the system appears to be underdamped (0<z<1) having a high performance from a control theory standpoint (fastest response with minimum ripple) with damping ratio z between 0.4 and 0.7. The results also show that the locomotor system of able-bodied walkers acts like a mechanical low-pass filter with cutoff frequency to be very close to the stepping frequency.
We were not able to identify with our previously described identification method [1] the mechanical impedance of the unilateral transfemoral amputees because of asymmetries between the sound and the affected side of the subject. We tried concatenation but the introduced discontinuities (or any filtering to smooth them) drastically changed the characteristics of the estimated system.
For our bilateral amputee (similar weight and height with our selected able-bodied subject and similar walking speed) we estimated the mechanical impedance via our method since there were no asymmetries between the two sides. The results show that the system is still underdamped but the location of the poles is different than the location of the poles of the able-bodied walker.
We calculated the proposed compensatory prosthesis approximating the able-bodied walker's locomotor system for that speed. The calculated compensatory prosthesis turned out to be a fourth order system which we approximated further to a first order system (simple spring and damper system).
The "walking wheel" model validated our identification method based on input and output data. It predicted correctly the values of the stiffness and damping which were known but not used in the estimation of these values. We are still working on this valuable model in order to develop a theory of shock absorption during walking.
Future Steps
The next step will be to construct two prostheses with the prescribed mechanical impedance values, fit the same bilateral transfemoral amputee with them and compare the resulted gait with the gait without any shock absorption mechanism.
References
- Bertos, G.A., Childress, D.S., Gard, S.A. (2005) "The vertical mechanical impedance of the locomotor system during human walking with applications in Rehabilitation", IEEE International Conference of Rehabilitation Robotics, Chicago, IL.
Related Publications
- Bertos G. (2006) "Identification of the Mechanical Impedance of the Human Locomotor System and Quantification of Shock Absorption Characteristics with Applications in Prosthetics" [PhD Dissertation]. Evanston, IL: Biomedical Engineering, Northwestern University.
- Bertos, G.A., Childress, D.S., Gard, S.A. (2005) "The vertical mechanical impedance of the locomotor system during human walking with applications in Rehabilitation", IEEE International Conference of Rehabilitation Robotics, Chicago, IL.
- Bertos, G.A., Childress, D.S., Gard, S.A. (2003) "Mechanical impedance identification of the human locomotor system during able-bodied walking", American Society of Biomechanics Conference, Toledo, OH, September 25-27.
- Bertos, G.A., Childress, D.S., Gard, S.A. (2003) "A steady state sinusoidal analysis method to identify the mechanical impedance of the human locomotor system during able-bodied walking", 26th International Conference of Rehabilitation Engineering & Assistive Technology of North America (RESNA), Atlanta, GA, June 19-23.
Development of an Equilibrium-Point Prosthetic Ankle Joint
- Principal Investigators: Dudley S. Childress, PhD, and Steven A. Gard, PhD
- Project Director: Andrew H. Hansen, PhD
- Co-Investigators: Edward C. Grahn, Dilip Thaker, and Rebecca L. Stine, MS
- Student Investigators: Ryan Williams, BS, and Brian L. Ruhe, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
The ability to walk on different terrains is a distinct advantage that legged locomotion has over wheeled transportation. However, many features that non-disabled persons utilize on uneven terrain are not incorporated into prostheses and orthoses, making it difficult for persons who use these devices to walk on irregular surfaces. In particular, many prosthetic feet have rigid ankles that cannot adapt to different levels of surface inclination. This project will focus on the development of a prosthetic ankle joint that can adapt (without manual intervention) to different levels of walking surface inclination and shoes of different heel heights.
Our objectives include development of a working prototype and evaluation of the new device on level and non-level terrains. The working prototype will be tested against commercially available prosthetic feet. Performance goals include similar or superior walking of persons with amputations when using the prototype as compared to other feet on level surfaces, and superior function when using the prototype on inclined and declined surfaces. Performance will be assessed using walking speed, roll-over shapes, gait kinematics and kinetics, and subjective evaluation by the users. Gait measurements will also be compared with walking data from non-disabled persons.
Patent
Equilibrium-Point Prosthetic and Orthotic Ankle-Foot Systems, Devices, and Methods of Use, US 20100185301 A1.
Related Publications
- Williams R, Hansen A, Gard S. (2009) Prosthetic Ankle-Foot Mechanism Capable of Automatic Adaptation to the Walking Surface. Journal of Biomechanical Engineering. 131(3):035002.
- Hansen A, Childress D, Miff S. (2004) Roll-over Characteristics of Human Walking on Inclined Surfaces. Human Movement Science, Vol. 23, No. 6, 807-821.
- Hansen A, Childress D, Miff S, Gard S, Mesplay K. (2004) The Human Ankle during Walking: Implications for Design of Biomimetic Ankle Prostheses and Orthoses. Journal of Biomechanics, Vol. 37, No. 10, 1467-1474.
Development of Subischial Prosthetic Sockets with Vacuum-Assisted Suspension for Highly Active Persons with Transfemoral Amputations
- Principal Investigator: Stefania Fatone, PhD, BPO(Hons)
- Co-Investigators: Ryan Caldwell, CP**; Matthew Major, PhD; Steven A. Gard, PhD; Wei Chen, PhD*; Cheng Sun, PhD*
- Consultants: R. J. Garrick, PhD; Andrew Hansen, PhD; Brian Ruhe, PhD
- Post-doctoral Fellow: Oluseeni Komolafe, PhD
- Research Assistants/Graduate Students: Brian Robillard, MS; Kevin Yngve, MS; Regan Radcliffe, MS; Sean Wood, MS; Kerice Tucker, BS; William Brett Johnson, PhD; Lilly Tran, MS
- Clinical Faculty: Michael Cavanaugh, CPO; Christopher Robinson, MS, MBA, CPO; John Michael, CPO; John Brinkmann, CPO
- Collaborators: Jason Wilken, PhD; John Fergason, CPO; Elizabeth Russell-Esposito, PhD; Andrea Ikeda, CP, Center for the Intrepid, Brooke Army Medical Center, San Antonio, TX
- Funded by: Department of Defense #W81XWH-10-0744
- Status: Completed
- Download a PDF of the Sub-Ischial Socket Work Form
Transfemoral (above-the-knee) amputation results in the loss of two major lower-limb joints: the ankle and knee. Loss of active knee control is one factor that makes mobility extremely challenging for persons with transfemoral amputation. Current transfemoral prosthetic socket designs encase the hip joint and portions of the pelvis, limiting range of motion at the hip and compromising comfort. While current prosthetic sockets are reasonably functional for persons with amputation levels below the knee and for those persons with low to moderate levels of function, they provide limited functional restoration for those with higher levels of amputation, especially highly active individuals.
Service persons with amputation present challenges that are different from the more typical older amputee with vascular problems. Individuals who enter the military are generally young and in excellent health prior to their combat-related injury. Many wounded soldiers wish to return to the level of activity they enjoyed before their injuries, including active duty. Therefore, they have much higher expectations of their function after amputation. Given the resources and time invested in training our military personnel and the substantial negative functional impact of a transfemoral amputation, providing these highly skilled, dedicated and motivated individuals with the rehabilitation and prosthetic technology necessary to return to an active and fulfilling life-style, including continued service is a desirable goal and worthwhile investment of resources.
To address these issues, a teachable subischial socket technique, the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket that aims to improve comfort without compromising function, was developed.
Outcomes of the Project
The Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket has lower proximal trim lines that do not impinge on the pelvis; is flexible so muscles can move comfortably within the socket as they contract during activity and improve sitting comfort; and is held securely to the residual limb by vacuum pump suction as well as compression of an undersized liner and socket. The socket includes a highly compressive, cylindrical fabric covered silicone liner, a flexible inner socket, and a shorter rigid outer socket with vacuum applied between liner and inner socket. An algorithm and rectification mapping were developed to facilitate decision making for socket fabrication. Socket comfort score, gait analysis, and clinical outcome measures (Rapid-Sit-To-Stand, Four-Square-Step-Test and T-Test of Agility) were used to assess socket performance. A hands-on workshop to teach this technique was piloted.
The undersized liner and socket are used to compress the residual limb, stiffening the soft tissue and decreasing relative motion of the limb within the socket. The impression is taken over the liner with the patient seated and the limb flexed and slightly abducted, allowing gravity to pre-modify the tissues. Rectifications were quantified using a program that aligned a series of 30 scans of rectified and unrectified negative molds and calculated changes in shape. A color coded scale on the rectification map indicates the depth and contours of the rectifications required for the NU-FlexSIV Socket, showing that plaster is primarily removed from the proximal-lateral and posterior regions, while the medial and anterior regions remain relatively untouched. No plaster is added. For 2 subjects, socket comfort increased in the NU-FlexSIV Socket compared to an ischial containment socket. Walking speed increased for the NU-FlexSIV Socket but other gait variables, including coronal plane trunk flexion and sagittal hip motion, were comparable for level ground walking. Clinical outcome measure performance was comparable in both sockets. Three workshops held in summer 2015 were attended by 31 prosthetists from the US and Canada. Attendees were taught to cast, rectify, fit and align the NU-FlexSIV Socket. Patient models responded positively to the comfort, range of motion and stability of the NU-FlexSIV Socket while prosthetists described the technique as “straight forward, reproducible”.
To the best of our knowledge, this is the first attempt to create a teachable subischial socket technique that results in improved comfort and comparable function to ischial containment sockets. Color coded rectification maps help communicate an important step in this socket technique, enhancing dissemination. Socket stability during walking was confirmed by lack of lateral trunk flexion and lateral socket gapping at mid stance. Clinical experience fitting this socket to nearly 100 patients confirms these research findings. Initial evaluation of the NU-FlexSIV Socket with military amputees is promising. Additional work includes an assessor-blinded, randomized cross-over trial comparing comfort and functional performance with the NU-FlexSIV Socket to the ischial containment socket in persons with unilateral transfemoral amputation.
Supplemental Funding
Supplemental funding was awarded through the Joint Warfighter Medical Research Program (JWMRP), to augment and accelerate high priority Department of Defense initiatives that are close to achieving their objectives and yielding a benefit to military medicine. Vacuum-assisted suspension uses an active pump to create a negative pressure differential between the interior of a prosthetic socket and the surface of a residual limb.
Within the scope of our original project, we developed plans and submitted patent applications for a hybrid, integrated electric/mechanical pump system. We fabricated prototypes and tested these hybrid vacuum pumps to demonstrate that they create suitable vacuum for suspension of the prosthesis in persons with transfemoral amputation.
Acknowledgements
NUPOC would like to acknowledge the support of Össur in providing knees and feet for use in the NU-FlexSIV Socket Courses held in 2016; and the support of Össur and Medi in donating liners for patient models who participated in the NU-FlexSIV Socket Courses held in Summer 2015.
Patents
Caldwell R, Hansen A, Wood S, Chen W, Radcliffe R, Yngve K, Kuhar B, Nelson AJ, Nickel E. Vacuum Pump Systems for Prosthetic Limbs and Methods of Using the Same. United States Patent 9,066,822. Issued on June 30, 2015.
Online Webinars
- Fatone S (2020) Introduction to the Northwestern University Sub-Ischial Socket Technique (NUFlexSIV and NUFlexSIS). Australian Orthotic and Prosthetic Association, April 30, Online Webinar. https://www.anymeeting.com/857-053-093/EA50D78483463D
- Caldwell R and Fatone S (2017) Introduction to the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket. This online webinar was hosted by the American Academy of Orthotists and Prosthetists.
Publications
2019
- Caldwell R, Fatone S (2019) Technique modifications for a suction suspension version of the Northwestern University Flexible Sub-Ischial Vacuum socket: The Northwestern University Flexible Sub-Ischial Suction socket. Prosthetics and Orthotics International, 43(2):233-239.
2018
- Brown SE, Russell Esposito E, Ikeda AJ, Wilken JM, Fatone S (2018) Evaluation of NU-FlexSIV Socket Performance for Military Service Members with Transfemoral Amputation. US Army Medical Department Journal (2-18):38-47. PMID: 30623397. (See: https://www.cs.amedd.army.mil/FileDownloadpublic.aspx?docid=3ee29f21-4ac6-4996-8708-7ce23e8e2d99)
- Fatone S, Caldwell R (2018) Emboîture sous-ischiatique flexible avec prise sous vide mise au point par la Northwestern University pour les personnes ayant subi une amputation transfémorale – partie 1 : description technique. [Northwestern University Flexible Subischial Vacuum Socket for Persons with Transfemoral Amputation: Part 1 Description of Technique.] Le Journal De L’Orthopedie, 18(66).
- Fatone S, Yohay, Caldwell R (2018) Change in residual limb size over time in the NU-FlexSIV socket: A case study. Prosthet Orthot Int. 42(6):620–625.
2017
- Caldwell R, Fatone S (2017) Technique for perforating a prosthetic liner to expel sweat. Journal of Prosthetics and Orthotics, 29(3):145–147.
- Fatone S, Caldwell R (2017) Northwestern University Flexible Subischial Vacuum Socket for Persons with Transfemoral Amputation: Part 1 Description of Technique. Prosthetics and Orthotics International, June; 41(3):237-245. [doi: 10.1177/0309364616685229].
- Fatone S, Caldwell R (2017) Northwestern University Flexible Subischial Vacuum Socket for Persons with Transfemoral Amputation: Part 2 Description and Preliminary Evaluation. Prosthetics and Orthotics International, June; 41(3):246-250. [doi: 10.1177/0309364616685230].
- Fatone S, Johnson WB, Tran L, Tucker K, Mowrer C, Caldwell R (2017) Quantification of Rectifications for the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket. Prosthetics Orthotics International, June; 41(3):251-257. [doi: 10.1177/0309364616684165].
2015
- Major M, Caldwell R, Fatone S (2015) Comparative effectiveness of electric vacuum pumps for creating suspension in transfemoral sockets. Journal of Prosthetics and Orthotics, 27(4):149–153.
- Major M, Caldwell R, Fatone S (2015) Evaluations of a Hybrid Vacuum Pump to Provide Vacuum-assisted Suspension for Above-knee Prostheses. American Society of Mechanical Engineers, Journal of Medical Devices. doi:10.1115/1.4030507. Online Technical Brief at ASME Digital Collections.
2013
- Komolafe O, Wood S, Caldwell R, Hansen A, Fatone S (2013) Methods for characterization of mechanical and electrical prosthetic vacuum pumps. Journal of Rehabilitation Research and Development, 50(8):1069–78. PMID: 24458892.
Presentations
2020
- Fatone, S and Caldwell R (2020) Development, Research and Dissemination of the Northwestern University Sub-Ischial Socket Technique. Minneapolis VA Research Service Conference Series, January 14, Minneapolis, MN.
2019
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Socket Technique: Development, Research, and Dissemination. Invited Presentation, AOPQ-AQIPA 2019 Congress, October 18-20, St-Hyacinthe, Quebec, Canada.
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket: Development, Research and Dissemination. Invited lecture, Iowa Prosthetics, Orthotics and Pedorthics Association (IPOPA) Meeting, April 6, Des Moines, IA.
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Socket Technique: Development, Research, and Dissemination. Invited presentation in the session “Innovations in Socket Design and Manufacturing” at the Orthotic and Prosthetic Innovative Technologies Conference (OPTech), May 16-18, Ann Arbor, MI.
- Fatone S (2019) Development and Dissemination of the Northwestern University Flexible Sub-Ischial Socket Technique. Invited presentation, ISPO Canada and RehabWeek, June 24-28, Toronto, Canada.
2018
- Fatone S (2018) The Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket: Development, Research and Dissemination. Keynote Lecture, Japanese Academy of Prosthetists and Orthotists 25th Scientific Meeting, July 21-22, Sapporo, Japan.
- Fatone S (2018) The NU-FlexSIV Socket: Development, Research and Dissemination. Invited Lecture, 11th Nordic Prosthetic and Orthotic Congress, September 6-8, Copenhagen, Denmark.
2017
- Fatone S (2017) The NU-FlexSIV Socket: Development, Research and Dissemination. Seminar Series, Center for Research in Human Movement Variability, University Nebraska at Omaha, December 1, Omaha, NE.
- Fatone S, Caldwell R (2017) Flexible Sub-Ischial Vacuum Socket Course. American Orthotic and Prosthetic Association World Congress, Pre-Conference Education Program, September 5, Las Vegas, NV.
- Fatone S, Caldwell R (2017) The NU-FlexSIV Socket Course. Presented twice as a Special Event at the 43rd Academy Annual Meeting & Scientific Symposium of the American Academy of Orthotists & Prosthetists (AAOP), March 1-4, Chicago, IL.
- Fatone S, Caldwell R (2017) The NU-FlexSIV Socket for Persons with Transfemoral Amputation: Description of Technique and Preliminary Evaluation. American Academy of Orthotists and Prosthetists Northwest Chapter Meeting, April 20-21, Bellevue, WA.
- Fatone S, Caldwell R, Major M (2017) Effect of interface components on residual limb weight-bearing tolerance in the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket. World Congress of the International Society for Prosthetics and Orthotics, May 8-11, Cape Town, South Africa.
- Fatone S, Tran L, Tucker K, Johnson WB, Mowrer C, Caldwell R (2017) Quantification of Rectifications for the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket. The 43rd Academy Annual Meeting & Scientific Symposium of the American Academy of Orthotists & Prosthetists (AAOP), March 1-4, Chicago, IL.
- Major MJ, Caldwell R, Hansen A, Fatone S (2017) Hybrid Vacuum Pump for Vacuum-Assisted Suspension in Transfemoral Prostheses. The 43rd Academy Annual Meeting & Scientific Symposium of the American Academy of Orthotists & Prosthetists (AAOP), March 1-4, Chicago, IL.
2016
- Brown SE, Russell Esposito E, Fatone S, Caldwell R, Wilken J (2016) Effect of socket design and suspension on walking mechanics. 40th Annual Meeting of the American Society of Biomechanics, August 2-5, Raleigh, NC.
- Brown SE, Russell Esposito E, Ikeda A, Fergason J, Caldwell R, Fatone S, and Wilken JM (2016) Effect of Socket Design and Suspension on Walking Mechanics. George E. Omer Jr. Research and Alumni Lectureship. Brooke Army Medical Center, June 16, San Antonio, TX.
- Caldwell R (2016) Modern Transfemoral Socket Alternatives and Technologies: The Science behind TFAs. 42nd American Academy of Orthotists and Prosthetists Annual Meeting & Scientific Symposium, March 9-11, Orlando, FL.
- Caldwell R and Fatone S (2016) Development of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation 12th Annual Lewis Landsberg Research Day, April 7, Northwestern University, Chicago, IL (poster).
- Caldwell R, Fatone S (2016) Development of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation. OT World Congress, May 3-6, Leipzig, Germany.
- Caldwell R, Fatone S (2016) NU-FlexSIV Socket. NUPOC Biennial Symposium for the German-Speaking Travel Fellows of Initiative ’93, February 25, Chicago, Illinois.
- Caldwell R, Fatone S (2016) Where Does the Weight Go? Effect of Interface Components on Residual Limb Weight-Bearing Tolerance in Transfemoral Prosthesis Users. Midwest Chapter of the American Academy of Orthotists and Prosthetists, November 3-5, Rosemont, IL.
- Fatone S (2016) Flexible Subischial Vacuum Socket for Transfemoral Amputees. Korean Orthopedic and Rehabilitation Engineering Center (KOREC) Workshop, November 7, Incheon, South Korea.
- Fatone S (2016) Flexible Subischial Vacuum Socket for Transfemoral Amputees. Asian Prosthetic and Orthotic Scientific Meeting 2016 (APOSM), November 4-6, Seoul, South Korea.
- Fatone S (2016) Introducing The Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket: a More Comfortable Socket for Transfemoral Amputees. PM&R Faculty Meeting, November 15, Chicago, IL.
- Fatone S (2016) Subischial Socket with Vacuum Assisted Suspension for Persons with Transfemoral Amputation. Danske Bandagister, April 1-2, Nyborg, Denmark.
- Fatone S (2016) The Final Frontier: Developments in Transfemoral Sockets. ISPO European Congress on Prosthetics and Orthotics 2016, October 6-8, Rotterdam, The Netherlands.
- Fatone S (2016) The Final Frontier: Developments in Transfemoral Sockets. Invited speaker, NUFSM PM&R/RIC Clinical Research Grand Rounds, July 11, Chicago, IL.
- Fatone S, Caldwell R (2016) Development of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation. Military Health System Research Symposium (MHSRS), August 15-18, Kissimmee, FL.
- Fatone S, Caldwell R (2016) Socket-Related Research Collaborations at Northwestern University. Scheck Fair. April 8-9, Lombard, IL.
- Fatone S, Caldwell R (2016) Development of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation. American Orthotic and Prosthetic Association National Assembly, September 8-11, Boston, MA.
2015
- Esposito ER, Fatone S, Wilken J, Caldwell R, Fergason J (2015) Sub-Ischial Prosthetic Sockets Improve Hip Range of Motion and Performance for Individuals with Transfemoral Amputations. 41st American Academy of Orthotists and Prosthetists Annual Meeting & Scientific Symposium, February 18-21, New Orleans, LA.
- Fatone S, Caldwell R (2015) An Introduction to Sub Ischial Sockets with Vacuum Assisted Suspension. Midwest Chapter, American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Session, May 27-29, Rosemont, IL.
- Fatone S, Caldwell R (2015) Northwestern University Flexible Subischial Vacuum Socket (NU-FlexSIV). World Congress of the International Society for Prosthetics and Orthotics, June 22-25, Lyon, France.
2014
- Caldwell R, Komolafe O, Fatone S (2014) Clinical outcomes using a new subischial socket with vacuum assisted suspension: the NU-FlexSIV. World Congress OTWorld 2014, May 13-16, Leipzig, Germany.
- Fatone S and Caldwell R (2014) Subischial Socket with Vacuum Assisted Suspension for Persons with Transfemoral Amputation. Instructional course presented at the Canadian Association for Prosthetics and Orthotics (CAPO) Annual Conference, August 6-9, 2014, Halifax, Nova Scotia, Canada.
- Fatone S, Caldwell R (2014) Subischial Socket with Vacuum Assisted Suspension for Persons with Transfemoral Amputation. 40th American Academy of Orthotists and Prosthetists Annual Meeting & Scientific Symposium, February 26-March 1, Chicago, IL.
2013
- Fatone S (2013) Development of Subischial Sockets for Persons with Transfemoral Amputation. Invited Speaker, ISPO Norge Seminar on “Lower Limb Socket Design and Rehabilitation”, October 22-23, Oslo and Åkershus University College, Norway.
- Fatone S (2013) Evaluation of Subischial Sockets for Persons with Transfemoral Amputation. Invited Speaker, ISPO Norge Seminar on “Lower Limb Socket Design and Rehabilitation”, October 22-23, Oslo and Åkershus University College, Norway.
- Fatone S, Caldwell R, Komolafe O, Tucker K. (2013) Subischial Sockets with Vacuum Assisted Suspension for Persons with Transfemoral Amputation. Instructional Course, World Congress of the International Society for Prosthetics and Orthotics, February 4-7, Hyderabad, India.
- Fatone S, Howell J, Caldwell R, Komolafe O, Stine R. (2013) Role of socket design, flexibility and suspension in transfemoral sockets during walking (poster). 39th Academy Annual Meeting and Scientific Symposium of the American Academy of Orthotists & Prosthetists, February 20-23, Orlando FL.
- Fatone S, Wood S, Caldwell R, Chen W, Sun C, Hansen A, Komolafe O. (2013) Characterization of Mechanical and Electrical Vacuum Pumps for Use in Vacuum-Assisted Suspension (poster). 14th World Congress of the International Society of Prosthetics and Orthotics, February 4-7, Hyderabad, India.
- Fatone S, Wood S, Caldwell R, Chen W, Sun C, Hansen A, Komolafe O (2013) Characterization of Mechanical and Electrical Vacuum Pumps for Use in Vacuum-Assisted Suspension (poster). 9th Annual Lewis Landsberg Research Day, Northwestern University, April 4, Chicago, IL.
- Fatone S, Wood S, Komolafe O, Caldwell R, Chen W, Sun C, Hansen A. (2013) Socket/Liner Interface Volume and Vacuum Pressure Decay in Persons with Transfemoral Amputations. 14th World Congress of the International Society of Prosthetics and Orthotics, February 4-7, Hyderabad, India.
- Komolafe O, Caldwell R, Fatone S (2013) An analytic approach to assessing transfemoral socket flexibility. Midwest Chapter of the American Academy of Orthotists and Prosthetists, May 30-June 1, Lake Geneva, WI.
- Komolafe O, Caldwell R, Fatone S (2013). An analytic approach to assessing transfemoral socket flexibility. 39th Academy Annual Meeting and Scientific Symposium of the American Academy of Orthotists & Prosthetists, February 20-23, Orlando FL.
- Komolafe O, Caldwell R, Fatone S (2013). Stress Analysis of Different Rigid Frame Designs with a Flexible Transfemoral Prosthetic Socket. 14th World Congress of the International Society of Prosthetics and Orthotics, February 4-7, Hyderabad, India.
- Komolafe OA, Caldwell, R, Fatone S. (2013) An Analytic Approach to Assessing Transfemoral Socket Flexibility. Texas Association of Orthotists and Prosthetists Annual Meeting, April 19-20, Dallas, TX.
- Robillard B, Komolafe O, Caldwell R, Fatone S (2013) Design of a process for fabricating prosthetic sockets with rapid prototyping technology (poster). InNUvations Applied Research Day, Northwestern University, May 2, Evanston, IL.
- Robillard B, Komolafe O, Caldwell R, Fatone S (2013) Fabricating prosthetic sockets with rapid prototyping technology (poster). 3rd Annual Musculoskeletal Research Day, Northwestern University, August 27, Chicago, IL.
- Robillard B, Komolafe O, Caldwell R, Fatone S (2013) Design of a Process for Fabricating Prosthetic Sockets with Rapid Prototyping Technology. 9th Annual Lewis Landsberg Research Day, Northwestern University, April 4, Chicago, IL.
- Robillard B, Komolafe O, Caldwell R, Fatone S (2013) Fabricating prosthetic sockets with rapid prototyping technology. Biomedical Engineering Society (BMES) Annual Meeting, September 25-28, Seattle, WA.
2012
- Caldwell, R. (2012) Subischial Socket Technology: Transfemoral Vacuum Concepts and Case Studies. Midwest Chapter American Academy of Orthotists and Prosthetists (AAOP) Annual Meeting & Scientific Session, September 27-29, Lake Geneva, WI.
- Fatone S. (2012) Sub-ischial Prosthetic Socket with Vacuum-Assisted Suspension for Persons with Transfemoral Amputation, in Design of Medical Devices Conference. April 10-12, Minneapolis MN.
- Komolafe O and Fatone S (2012). Stress Analysis of Different Transfemoral Prosthetic Socket Frame Designs. Midwest Chapter American Academy of Orthotists and Prosthetists (AAOP) Annual Meeting & Scientific Session, September 27-29, Lake Geneva, WI.
- Komolafe O, Caldwell R, Tucker K, Sun C, Chen W, Hansen A, Fatone S. (2012) Stress Analysis of Different Rigid Frame Designs of within a Flexible Transfemoral Prosthetic Socket, in 38th American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Symposium. March 21-24, Atlanta GA.
- Komolafe O, Tucker K, Caldwell R, Fatone S (2012) Quantification of Transfemoral Prosthetic Socket Fabrication (poster). Military Health System Research Symposium, August 13-16, Fort Lauderdale FL.
- Wood S, Caldwell R, Chen W, Sun C, Hansen A, Fatone S (2012) Socket/Liner Interface Volume and Vacuum Pressure Decay in Persons with Transfemoral Amputations in 38th American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Symposium. March 21-24, Atlanta GA.
- Wood S, Caldwell R, Chen W, Sun C, Hansen A, Komolafe O, Fatone S (2012) Characterization of Mechanical and Electrical Vacuum Pumps for Use in Vacuum-Assisted Suspension in 38th American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Symposium. March 21-24, Atlanta GA.
Theses
- Robillard B (2014) Design of a Process for Fabricating Prosthetic Sockets with Additive Manufacturing Technology, Master’s Thesis, Biomedical Engineering, Northwestern University, Evanston, IL.
- Wood S (2011) Vacuum Pump Characterization and Development, BS/MS Thesis, Mechanical Engineering, Northwestern University, Evanston, IL.
Related Information
- Katie Gazola – NU-FlexSIV Socket Review. SearchLab, October 23, 2018.
- Mulroy-Lang S (2018) Overview of the NU-FlexSIV Method with Case Studies. New Zealand Orthotic and Prosthetic Association, 10th Annual Conference, June 1-2, Auckland, NZ. https://www.nzopa2018.com/programme.html
- A Prosthetic Socket Technology for Transfemoral Prosthesis Users That Improves Active Range of Motion and Reduces Socket Impingement. In DoD Blast Injury Research Program 2017 Science & Technology Efforts & Programs Prevention, Mitigation, and Treatment of Blast Injuries Annual Report to the Executive Agent, Advancing Blast Injury Research to Protect and Heal Those Who Serve, Blast Injury Research Program Coordinating Office, US Department of Defense, 2017.
See full report: https://blastinjuryresearch.amedd.army.mil/index.cfm/annual_reports
See Project Summary: https://blastinjuryresearch.amedd.army.mil/assets/docs/reset/fy17/orthotics_and_prosthetics/Prosthetic_Socket_Technology.pdf - Scheck & Siress Partners with Northwestern University for Multi-Year Clinical Trial, on website belonging to Scheck & Siress, featured June 26, 2017.
- The NU-FlexSIV Socket Technology, on website belonging to Horizon Orthotic & Prosthetic Experience.
- Andrew's Story: Moving Forward with the NU-Flex Socket, Patient Stories, on website belonging to Ability Prosthetics & Othotics, Inc, featured May 10, 2016.
- Anon. (2017) Technique Described for Perforating a Prosthetic Liner to Expel Sweat. The O&P Edge, June 20.
- Fairley, Miki. (2017) Adapting Fabrication Skills with Changing Technology. The O&P Edge, 16(7), 26-28.
- Caldwell R, Fatone S (2016) Development of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation. OT World Congress, May 3-6, Leipzig, Germany. Spotlighted in The O&P Edge “OTWorld Session Sneak Peeks.” http://www.oandp.com/articles/2016-04_10.asp
- Fairley M (2016) Expanding Clinical Skills and Knowledge: Rehabilitative Care for Wounded Warriors Meets Unique Challenges. The O&P Edge, February, 15(2):26-36. http://www.oandp.com/articles/2016-02_02.asp
- Kahle J and Highsmith JM (2016) The Newest Technology in Transfemoral Socket Interfaces. InMotion, March/April, 26(2):38-43.
- NUPOC Launches the NU-FlexSIV Socket. Industry Review in The O and P Edge, October 2016:10.
- NUPOC Launches the NU-FlexSIV Socket. oandp.com, August 25, 2016.
- Storey M, Thomas D (2016) Sub-ischial transfemoral socket design. Australian Orthotic and Prosthetic Association Congress, 6-8 October, Melbourne, Australia.
- Advanced O&P Solutions Facebook Page, September 29 2015. https://www.facebook.com/AOPSolutions/photos/a.462843250481741.1073741828.460835084015891/823255034440559/?type=3&theater
- “Researchers Showcase Prosthetic Socket Design.” Northwestern Research News, September, 2015;8(1):11.
- “Study Examines Comparative Effectiveness of Electric Vacuum Suspension Pumps” September 20, 2015. http://www.oandp.com/articles/NEWS_2015-09-20_02.asp
- Gissal J (2014) Scheck & Siress Prosthetist Ryan Caldwell, CP/L, FAAOP, Contributes to NUPOC Research. Scheck It Out, February 24, 2014.
- Murphy C (2013) Socket Technology and Design: the Future of an Evolving Practice. O&P Business News, February 2013.
- World Congress Highlight, Subischial sockets for persons with transfemoral amputation. ISPO ANMS eNews, March 2013.
Effect of Prosthesis Stiffness on Impact Forces During In Vivo Step Loads and Gait
- Principal Investigator: Steven A. Gard, PhD
- Student Investigator: Erin Boutwell, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR); Orthotic and Prosthetic Education and Research Foundation (OPERF); and the Jesse Brown VA Medical Center (Chicago, IL).
- Status: Completed
Shock absorption is an inherent function of the intact lower limbs during walking that is substantially reduced in people who have lost some or all of their lower limbs. These individuals are often acutely aware of the jarring impact forces that can occur when they step with their prosthesis. Prosthetic components with reduced stiffness are commonly prescribed to change the mechanical response of the prosthesis to an applied load, with the intent of providing shock absorption and reducing forces transmitted to the residual limb during gait. However, contrary to expectations, these components do not generally decrease ground reaction force (GRF) loading peaks, an indicator of shock absorption during walking. This finding may suggest that either these reduced-stiffness components do not work in the intended fashion, or else subjects are implementing compensatory strategies to exert some control over total limb stiffness.
To investigate these possibilities, this study will evaluate reduced-stiffness components in two different loading conditions: an impact "drop" test (similar to stepping off a curb) and a walking study. No change in the GRF peaks is expected during gait, as previous literature has indicated that prosthesis users adapt to analogous changes in prosthetic stiffness. In contrast, decreased force peaks are anticipated in the impact testing, as the controlled, rapid drop will minimize adaptation by the user and permit the reduced-stiffness component to function as intended. Additionally, the level of stiffness that provides optimal shock absorption is currently unknown. Therefore, the proposed study involves a systematic variation of the internal spring of a shock-absorbing pylon (i.e., the reduced-stiffness component) over a range of stiffness values. The results of these experiments will provide information on the effect of prosthesis stiffness on impact forces under varying loading and stiffness conditions, yielding information for the future design and prescription of reduced-stiffness components.
Related Publications
- Boutwell E and Gard S. (2013) "Effect of Prosthetic Stiffness on Impact Forces during Walking and Sudden Limb Loading." (Poster). Annual Meeting of the Gait and Clinical Movement Analysis Society (GCMAS). May 14-17. Cincinnati, OH.
- Boutwell E and Gard S. (2013) "Investigation of In Vivo Prosthesis/Residual Limb Stiffness Using a Novel Impact Test Apparatus." International Society for Prosthetics and Orthotics (ISPO) 14th World Congress. February 4-7. Hyderabad, India.
- Boutwell E, Stine R, Gard S. (2014) “A Novel in vivo Impact Device for Evaluation of Sudden Limb Loading Response.” Medical Engineering & Physics:doi:10.1016/j.medengphy.2014.10.008.
- Boutwell E. (2014) Effect of Prosthesis Stiffness on Impact Force during In Vivo Step Loads and Gait. Midwest Chapter of the American Academy of Orthotists and Prosthetists, One Day Fall Symposium, November 15, Hickory Hills, IL.
- Boutwell E, Stine R, Gard S. (2015) Influence of longitudinal prosthetic stiffness modifications on ground reaction forces during transtibial gait. Annual meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 18-21, New Orleans, Louisiana.
- Boutwell E, Stine R, Gard S. (2015) Influence of longitudinal stiffness modification on impact forces within the transtibial prosthesis. Annual meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 18-21, New Orleans, LA.
- Boutwell E, Stine R, Gard S. (2015) The effect of prosthetic stiffness on shock absorption during transtibial gait. Annual meeting of the Gait and Clinical Movement Analysis Society, March 18-21, Portland, OR.
- Boutwell E, Stine R, Gard S. (2015) Effect of longitudinal prosthesis stiffness on force transmission during transtibial amputee gait. 15th World Congress of the International Society of Prosthetics and Orthotics, June 22-25, Lyon, France.
- Boutwell E, Stine R, Gard S. (2015) Effect of longitudinal prosthesis stiffness on force transmission during in vivo impact loading. 15th World Congress of the International Society of Prosthetics and Orthotics, June 22-25, Lyon, France.
Effect of Roll-over Shape Arc Length on Gait of Transtibial Prosthesis Users
- Principal Investigators: Dudley S. Childress, PhD and Steven A. Gard, PhD
- Project Director: Andrew H. Hansen, PhD
- Co-Investigator: Margrit R. Meier, PhD
- Student Investigator: Pinata H. Sessoms, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
Prosthetic feet that are commercially available have a wide range of mechanical properties, leading to differences in their roll-over shapes during walking. The arc length of the prosthetic foot's roll-over shape may be an important determinant of step length and loading properties on the contralateral limb. In particular, this study examines the hypothesis that shortening a prosthetic foot's arc length (in the forefoot section) will lead to increased loading and decreased step length on the contralateral limb. A shortened forefoot arc length is thought to create a "drop-off" effect at the end of single-limb stance phase as the person rolls to the end of the prosthetic foot's roll-over shape.
Purpose
Previous work [1] has reported decreased loading to the sound limb when the Flexfoot prosthesis is used as opposed to other prosthetic feet. Our work suggests this difference comes as a result of the Flexfoot's long roll-over shape arc length [2]. In particular, we hypothesize that persons walking on feet with short effective foot lengths experience a "drop-off" effect at the end of stance on the prosthesis, leading to a shortened step length and a larger loading response on the sound limb [2,3].
The objective of this study was to systematically alter the arc length of the Shape&Roll Prosthetic Foot's roll-over shape to determine if step length and limb loading on the sound limbs of persons using transtibial prostheses were affected. The Shape&Roll Prosthetic Foot was chosen due to its design structure, which allows for easy adaptation of the arc length without interfering with other mechanical properties.
Methodology
Subjects with trans-tibial amputations were recruited to participate in the study. Each subject used the socket from his or her own prosthesis. The Shape&Roll foot was connected to the socket and aligned by an experienced prosthetist. Gait analysis was performed with the person walking at slow, normal, and fast self-selected walking speeds. Next, a wedge cut was made in the foot to shorten its effective foot length and another gait analysis was performed. Lastly, a second wedge cut was made in the foot, and a third gait analysis was performed (see Figure 1). The prosthetic foot had a removable foot cover, was covered with a sock, and was placed inside a shoe, visually blinding the subjects to its alterations. The same alignment was used for all three conditions.
In the initial testing, subjects with unilateral trans-tibial amputations were recruited for testing. The study has been expanded recently to include persons with bilateral trans-tibial amputations.
Results
The portion of this experiment that studies persons with unilateral amputations has been completed. Fourteen subjects finished the study and were included in data analyses. Shortening the roll-over shape arc length significantly increased the difference in first peaks of the vertical ground reaction forces, i.e. the sound limb loading peak became greater in magnitude as the roll-over shape arc length was decreased (see Figure 2). As the arc lengths of the roll-over shapes were reduced, the external ankle dorsiflexion moments in late stance were significantly reduced compared with those on the sound side (see Figure 3). Trends supported the idea that a shortened step of the sound limb would occur when roll-over shape arc lengths were shortened on the prosthetic side, but these trends were not statistically significant.
References
- Powers et al. (1994) Arch Phys Med Rehabil, 75:825-829.[2] Hansen et al. (2000) Prosthet Orthot Int, 24(3), 205-215.[3] Hansen et al. (2004) J Prosthet Orthot, 16(2), 41-45.
Related Publications
- Hansen, A., Meier, M., Lambla, S., Sessoms, P., Childress, D. (2004). Effects of Prosthetic Foot Roll-over Shape Arc Length on Gait of Trans-tibial Prosthesis Users. 11th World Congress of the International Society for Prosthetics and Orthotics. Hong Kong, China, August 1-6.
- Hansen, A., Meier, M., Sessoms, P., Childress, D. (2006). The Effects of Prosthetic Foot Roll-over Shape Arc Length on the Gait of Trans-tibial Prosthesis Users. Prosthetics and Orthotics International, Vol. 30, No. 3, 286-299.
Effects of Prosthetic Foot Rocker Radius on Gait of Prosthesis Users
- Principal Investigators: Hansen, PhD and Steven Gard, PhD
- Project Director: Elizabeth Klodd, MS
- Co-Investigator: Mark Edwards, CP, MHPE, Northwestern University Prosthetics-Orthotics Center (NUPOC)
- Funded by: Department of Veterans Affairs Rehabilitation Research and Development, Merit Review Grant
- Status: Completed
The purpose of this project is to determine if prosthetic feet made to mimic the able-bodied ankle-foot roll-over shape will provide any biomechanical or energetic advantage to their users during walking.
Background
Prosthetic feet conform to effective rocker shapes, or roll-over shapes, during walking by bending under loads imposed by their users (see Figure 1). The radius of curvature (R) that a prosthetic foot conforms to is a function of the user's weight, their walking speed, and the material properties of the prosthetic foot. Under similar loading conditions, a "soft" foot will conform to a smaller radius and a "stiff" foot will conform to a larger radius (see Figure 2). Characteristics of the roll-over shape including the radius of curvature and the arc length can be used to quantify differences in prosthetic foot design.
Previous studies comparing prosthetic foot types have most commonly examined ankle flexion during walking. However, most prosthetic feet do not have articulations at the ankle. The measured ankle flexion in these cases reflects a general degree of bending in the feet but is also dependent on placement of gait analysis markers on top of the foot. However, roll-over shape incorporates the net effect of bending of joints and material deformations occurring between the rigid attachment surface of prosthetic ankle-foot components and the floor, providing an effective rocker shape (see Figure 1).
The roll-over shapes of able-bodied ankle-foot systems can be measured and used for comparison with roll-over shapes of prosthetic ankle-foot devices. Our lab has measured the roll-over shape of the able-bodied ankle-foot system under various conditions of level ground walking including a wide range of speeds, while carrying added loads, and when walking with shoes of different heel heights (Hansen et al, 2004; Hansen and Childress, 2004; Hansen and Childress, 2005). In general, our group found that able-bodied persons adapt under conditions of level ground walking to maintain a roll-over shape with a radius approximately equal to 35% of their leg length. This radius is between the values predicted by researchers studying walking with physical models (McGeer, 1990) and mathematical models (Gard and Childress, 2001).
Methods
We will measure the oxygen cost of users while walking with five prosthetic feet having different roll-over shape radii. Each participant will walk with the five different feet on a treadmill at the same self-selected speed. We will also perform gait analyses on the subjects walking with the five different feet. Body center of mass movements, joint kinematics, joint kinetics, ground reaction forces, and temporal-spatial parameters of gait will be analyzed to document changes that occur when using feet with different radii.
The proposed work takes a step toward determining if roll-over shape can be used as a prescription tool for prosthetic ankle-foot mechanisms. Roll-over shape arc length has already been shown to affect loading on the sound limb (Hansen et al., 2006). Future work will need to examine other factors important for prescription of prosthetic ankle-foot systems such as stiffness profiles of feet in producing their roll-over shapes and torsional properties of prostheses during movement. Roll-over shapes of various prosthetic foot designs can be quickly and easily measured in a laboratory setting and then shared with clinicians, making their future use in prescription feasible.
References
- Gard, S.A. and Childress, D.S. (2001). What determines the vertical displacement of the body during normal walking? J Prosthet Orthot, 13: 64-67.
- Hansen, A. and Childress, D. (2004) Effects of Shoe Heel Height on Biologic Roll-over Characteristics During Walking. Journal of Rehabilitation Research and Development, Vol. 41, No. 4, 547-554.
- Hansen, A. and Childress, D. (2005) Effects of Adding Weight to the Torso on Roll-over Characteristics of Walking. Journal of Rehabilitation Research and Development, Vol. 42, No. 3, 381-390.
- Hansen, A. H., Childress, D. S., and Knox, E. H. (2004a). Roll-over shapes of human locomotor systems:effects of walking speed. Clin Biomech 19(4), 407-14.
- Hansen, A., Meier, M., Sessoms, P., and Childress, D. (2006) The Effects of Prosthetic Foot Roll-over Shape Arc Length on the Gait of Trans-tibial Prosthesis Users. Proshetics and Orthotics International, Vol. 30, No. 3, 286-299.
- McGeer, T. (1990). Passive Dynamic Walking. International Journal of Robotics Research, 9: 62-82.
Related Presentations and Publications
- Klodd E, Hansen A, Fatone S, Edwards M. Effects of Prosthetic Foot Forefoot Flexibility on Gait of Unilateral Transtibial Prosthesis Users. J Rehabil Res Dev. 2010;47(9):899-910.
- Klodd E, Hansen A, Fatone S, Edwards M. Effects of Prosthetic Foot Forefoot Flexibility on Oxygen Cost and Subjective Preference Rankings of Unilateral Transtibial Prosthesis Users. J Rehabil Res Dev. 2010;47(6):543-52.
- Hansen A, Klodd E, Meier M, et al. Use of Experimental Prosthetic Feet to Improve Understanding of Prosthetic Foot Function for Lower Limb Prosthesis Users. Paper presented at: 13th ISPO World Congress; May 10-15, 2010; Leipzig, Germany.
- Hansen A, Klodd E, Meier M, et al. Use of experimental prosthetic feet to study effects of forefoot flexibility and effective keel length on gait of prosthesis users. Paper presented at: Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists; February 24-27, 2010; Chicago, IL.
- Klodd E, Hansen A, Edwards M. Effects of Prosthetic Foot Roll-over Shape Radius on Gait of Lower Limb Prosthesis Users. Paper presented at: Annual Meeting of the Biomedical Engineering Society; October 1-4, 2008; Saint Louis, MO.
- Klodd E. The Effects of Prosthetic Foot Roll-over Shape Radius on Gait of Unilateral Transtibial Prosthesis Users [MS Thesis]. Evanston, IL: Biomedical Engineering, Northwestern University; 2008.
Evaluating Outcomes of Dysvascular Partial Foot and Transtibial Amputation: a Systematic Review and Development of Shared Decision Making Resources
- Principal Investigator: Michael Dillon, PhD, BPO(Hons), La Trobe University, Australia
- Co-Investigator: Stefania Fatone, PhD, BPO(Hons)
- Research Assistant: Matthew Quigley, MCPO(Hons), La Trobe University, Australia
- Funded by: American Orthotic and Prosthetic Association
- Status: Completed
While the incidence of lower limb amputation has remained constant over the last 15 years, there appears to have been a dramatic shift in the types of lower limb amputations performed. The incidence of transtibial amputation seems to have declined and there is some evidence that partial foot amputation has increased proportionately. If these trends hold true into the future, the incidence of partial foot amputation is expected to triple across the first half of this century.
Our uncertainty about these observations is a reflection of the way different health jurisdictions and researchers measure and report these data. For example, counting of first-ever (index) amputation underestimates the number of surgeries compared to counting all amputation procedures, but may better capture the number of people affected. This is particularly problematic in people with partial foot amputation given that one-third of amputations are revised to a higher level. Many studies only count major amputations (e.g., above-the-ankle) and underreport the incidence given that up to three-quarters of all lower limb amputations are partial foot amputations.
These variations in study design cloud our understanding of the true incidence of partial foot and transtibial amputation, the incidence of secondary amputations, as well as changes in both over time. A systematic review designed to critically appraise recent epidemiological research would provide a better understanding of changes in the population of people living with limb loss. These data are important to help plan for the projected increase in the number of people living with partial foot amputation and the specialist clinical services they require (e.g., wound care and high risk foot clinics, prosthetic, orthotic and pedorthic services). Notwithstanding the limitations of the epidemiology evidence, the shift from transtibial to partial foot amputation will be seen by many as a significant improvement; particularly given an understanding that preserving the ankle joint results in more normal gait, reduced energy expenditure, improved quality of life, and lower mortality. However, partial foot amputation has been associated with a significant rate of failure and numerous complications. Between 30-50% of people with partial foot amputation will experience complications including: dehiscence, ulceration or complete failure of the wound to heal. Only about 50% of all partial foot amputations heal, with no appreciable difference based on level of partial foot amputation. The rate of healing of partial foot amputations is only about 10% better in non-diabetic populations, which makes it difficult to conclude that the high failure rate is simply a reflection of advanced systemic disease. About one-third of people with an initial partial foot amputation will require revision surgery, most commonly within three months. The rates of failure and reamputation in people with partial foot amputation are disproportionately high when you consider that more than 80% of all transtibial amputations heal, and only about 10% require subsequent amputation surgery on the same limb.
The potential benefits and complications of partial foot amputation have recently been the focus of editorials by PI Dillon and Co-Investigator Fatone. These commentaries challenge the long-held belief that the high rates of complications and reamputation are worth the potential benefits; particularly given that once the metatarsal heads are affected, the gait of people with partial foot and transtibial amputation is virtually indistinguishable. Similarly, measures of community mobility, energy expenditure, balance, and quality of life also appear to be comparable in people with partial foot and transtibial amputation.
While these editorials resulted in a number of letters to the editor and considerable media attention, concerns have been raised that require closer scrutiny of the evidence. For example, much of the literature focuses on people with mid-foot amputations and there is suggestion that outcomes may be better for people with toe amputations. Similarly, some studies report very high rates of wound healing in people with partial foot amputation - comparable to those for people with transtibial amputation - but it is unclear what made some surgical and rehabilitation programs so much more effective. There appears to have been little focus on the psychological and social outcomes, which is of particular concern given the experience of people with partial foot amputation. Isolated studies suggest that people with partial foot amputation report a pervasive fear and anxiety about the prospect of future amputations that has not been reported by people with transtibial amputation.
The aim of this project will be to compare the outcomes of people with partial foot and transtibial amputation secondary to peripheral vascular disease and/or diabetes as well as translate what we learn from this research to help clinicians and patients make well-informed decisions about amputation surgery.
Review Protocol Registration
Michael Dillon, Stefania Fatone, Matthew Quigley. Describing the outcomes of dysvascular partial foot amputation and how these compare to transtibial amputation: a systematic review protocol for the development of shared decision making resources. PROSPERO 2015:CRD42015029186 Available from http://www.crd.york.ac.uk/PROSPERO/display_record.asp?ID=CRD42015029186
Publications
2018
- Dillon M, Fatone S, Quigley M (2018) Uncertainty with long-term predictions of lower limb amputation prevalence and what this means for prosthetic and orthotic research. Journal of Prosthetics and Orthotics. 30(3):122-123.
- Quigley M, Dillon M, Fatone S (2018) Development of shared decision making resources to help inform difficult healthcare decisions: an example focused on dysvascular partial foot and transtibial amputation. Prosthetics and Orthotics International, 42(4) 378–386.
2017
- Dillon MP, Quigley M, Fatone S (2017) A systematic review describing incidence rate and prevalence of dysvascular partial foot amputation; how both have changed over time and compare to transtibial amputation. Journal of Systematic Reviews, 6:230. doi.org/10.1186/s13643-017-0626-0
- Dillon M, Quigley M, Fatone S (2017) Helping inform difficult decisions about partial foot amputation using a shared decision making approach. Amplified, Limbs4Life Magazine, Australia, Edition 1, p. 21-23.
- Dillon M, Fatone S, Quigley M. 2017 While Mortality Rates Differ after Dysvascular Partial Foot and Transtibial Amputation, Should They Influence the Choice of Amputation Level? Archives of Physical Medicine and Rehabilitation, 98:1900-2.
- Dillon M, Quigley M, Fatone S (2017) Outcomes of dysvascular partial foot amputation and how these compare to transtibial amputation: a systematic review for the development of shared decision-making resources. Systematic Reviews, 6:54 DOI 10.1186/s13643-017-0433-7 http://systematicreviewsjournal.biomedcentral.com/articles/10.1186/s13643-017-0433-7
- Dillon M, Fatone S, Quigley M (accepted Oct 2017) Uncertainty with long-term predictions of lower limb amputation prevalence and what this means for prosthetic and orthotic research. Journal of Prosthetics and Orthotics.
2015
- Dillon M, Fatone S, Quigley M (2015) Describe the outcomes of dysvascular partial foot amputation and how these compare to transtibial amputation: a systematic review protocol for the development of shared decision making resources. Systematic Reviews. 4:173 doi:10.1186/s13643-015-0161-9
Presentations
2019
- Dillon M, Quigley M, Fatone S (2019) Informing decisions about dysvascular partial foot amputation using a shared decision-making approach. Invited Presentation, American Academy of Orthotists and Prosthetists Annual Meeting, March 6-9, Orlando, FL.
2018
- Fatone S, Dillon M, Quigley M (2018) Informing decisions about dysvascular partial foot amputation using a shared decision-making approach. Invited Lecture, 11th Nordic Prosthetic and Orthotic Congress, September 6-8, Copenhagen, Denmark.
2017
- Dillon M, Fatone S (2017) The experience of sequential partial foot and transtibial amputation: implications for shared decision making about amputation surgery. American Orthotic and Prosthetic Association World Congress, September 6-9, Las Vegas, NV.
- Dillon M, Fatone S (2017) Outcomes of Dysvascular Partial Foot Amputation. The 43rd Academy Annual Meeting & Scientific Symposium of the American Academy of Orthotists & Prosthetists (AAOP), March 1-4, Chicago, IL.
- Dillon M, Fatone S, Hoffman T (2017) Symposium: Outcomes of partial foot amputation can inform difficult decisions about amputation surgery using a shared decision-making approach. World Congress of the International Society for Prosthetics and Orthotics, May 8-11, Cape Town, South Africa.
- Dillon MP, Quigley M, Fatone S (2017) Introduction to shared decision making in prosthetics and orthotics: an example to inform decisions about partial foot amputation surgery. Australian Orthotic Prosthetic Association National Congress, October 5-7, Melbourne, Australia.
2016
- Dillon M, Fatone S, Hoffman T (2016) Symposium: Outcomes of partial foot amputation can inform difficult decisions about amputation surgery using a shared decision-making approach. American Orthotic and Prosthetic Association National Assembly, September 8-11, Boston, MA.
- Dillon M.P. (2016) Deliberations about the functional benefits and complications of partial foot amputation. Grand Rounds, University of Iowa Hospitals, Cedar Rapids, USA. Invited address.
- Femino J, Pascarelli L, Dillon MP (2016) Invited Symposium: Lower limb amputation surgical options – perspectives of vascular and orthopaedic surgeons. American Orthotic and Prosthetic Association National Assembly, September 8-11, Boston, MA.
Related Publications
- American Orthotic Prosthetic Association. AOPA-Funded Systematic Review Is Now Complete. AOPA website, April 2018.
- Anon. (2018) We did everything to save that leg. O&P News, January 2018, p4-7.
- Anon. (2017) AOPA Funded Systematic Review Published in Open Access Journal. O&P Almanac, April 2017, p10.
- Dillon, M. P., Anderson, S. P., Duke, E. J., Ozturk, H. E., & Stuckey, R. (2019). The lived experience of sequential partial foot and transtibial amputation. Disability and Rehabilitation. https://doi.org/10.1080/09638288.2018.1555288
- Groner C (2018) Limb Salvage or Amputation of the Diabetic Foot? Lower Extremity Review Magazine, April 2018, p 17-25.
Examinations of Balance and Balance Efficiency in Persons with Transfemoral Amputation
- Principal Investigator: Steven A. Gard, PhD
- Co-Investigators: Brian L. Ruhe, MS, and Rebecca L. Stine, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
The purpose of this investigation is to determine the underlying biomechanical factors contributing to static balance efficiency in persons with lower limb amputations. Unlike able-bodied persons who maintain an upright posture through foot, ankle, and sometimes knee kinematics, persons with lower limb amputation rely on the mechanical properties of their prosthesis, prosthetic alignment, and their intact hip and lumbar spine to remain balanced on all types of surfaces. As a result, the mechanical properties and alignment of prosthetic feet/ankles have a large impact on the ability of persons with lower limb amputation to efficiently balance on sloped surfaces. Passively compliant prosthetic foot/ankle devices improve the ability of persons with lower limb amputation to negotiate surface slopes by conforming to the surface through joint articulations. As these articulations occur under load, more of the prosthetic foot's surface area is in contact with the ground. This increases the base of support (BoS), however, articulations of these passive compliant feet create forces to return the foot/ankle to its neutral position. These forces must be managed by the prosthesis user, which affects overall standing balance efficiency. Prosthetic alignment is the positioning of the prosthetic foot/ankle and knee in three dimensional space under a prosthetic socket. It is believed that optimal prosthetic alignment decreases loads on the residual limb and improves functional performance of the human/mechanical system. Typically, alignment of a prosthesis is performed in a clinic on a level surface. A dynamic iterative process results in a prosthetic alignment that is a compromise between standing and walking on level surfaces, but there is a lack of data to understand how this alignment procedure affects the overall standing balance efficiency of persons with lower limb amputation on sloped surfaces. This goals of this study are to examine how compliant and non-compliant prosthetic feet/ankles and prosthetic foot/ankle alignment affect balance efficiency on level and sloped surfaces in persons with transfemoral amputations.
Specific Objectives
The specific aims of this project are: (1) to determine how sloped surfaces affect the kinematics, kinetics, electromyography (EMG), and metabolic energy expenditures of able-bodied persons; (2) to determine how sloped surfaces and prosthetic foot compliance affect the kinematics, kinetics, EMG, and metabolic energy expenditures of persons with unilateral transfemoral amputation where the prosthetic foot/ankle is 'neutrally' aligned in the clinic for everyday use; (3) to determine how sloped surfaces and prosthetic foot compliance affect the kinematics, kinetics, EMG, and metabolic energy expenditures of persons with unilateral transfemoral amputation where the prosthetic foot/ankle is aligned specifically for each sloped surface.
Preliminary Results
Data were collected on a person with bilateral amputations where prosthetic foot/ankle alignment changes of a stiff prosthetic foot/ankle were implemented for different slope surfaces. Large angular changes in the hip (~25° increase in hip flexion) and trunk (~40° increase in trunk flexion) were employed to maintain balance on a +7.5° sloped surface with standard clinical alignment. When the foot/ankle was dorsiflexed approximately 7.5°, the hip and trunk flexion angles returned to values similar to standing on a level surface with standard clinical alignment (SCA). EMG data showed increases in the medial hamstrings and erector spinae when standing on inclined sloped surfaces with standard clinical alignment. With the baseline value set as standing on a level surface with SCA, the metabolic energy data shows increases of 54% when standing on the +7.5° surface with SCA, but only increased 6.1% with adapted alignment. (See Model of different body postures standing on slopes)
Clinical Implications
Preliminary data suggest that adaptable alignment can have positive affects on standing balance efficiency. Through simple changes in sagittal plane angular prosthetic foot/ankle position, more erect postures, decreases in muscular demands and metabolic energy consumption can be realized. The results of this study will provide a foundation for the design and development of prosthetic foot/ankle devices that can adapt to various terrains. The adaptable prosthetic foot/ankle has the potential to reduce kinematic compensations, ultimately reducing energy consumption. The reduction of energy consumption will allow users to increase functional activities to improve their daily lives.
Publications
- Ruhe, B.L. Examinations of Balance and Balance Efficiency in Persons with TransFemoral Amputation: Preliminary Data. Midwest Chapter Meeting of the American Academy of Orthotists and Prosthetists, Joliet, IL, June 27-28, 2008.
- Ruhe, B.L. and Gard, S.A. Effect of prosthetic foot/ankle alignment on balance efficiency while standing on sloped surfaces in persons with transfemoral amputations. Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, Atlanta, GA, March 4-7, 2009.
- Ruhe, Brian L. (2009). “Investigations of Standing Balance Efficiency on Sloped Surfaces in Persons with Transfemoral Amputation", Doctoral Dissertation, Biomedical Engineering, Northwestern University.
- Ruhe B, Hansen A, Gard S. Investigation of the Effect of Prosthetic Foot/Ankle Properties on Balance Efficiency while Standing on Inclined, Declined, and Level Surfaces. Paper presented at: 13th ISPO World Congress; May 10-15, 2010; Leipzig, Germany.
Functional Performance Evaluation of the Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket for Persons with Transfemoral Amputation
- Principal Investigator: Stefania Fatone, PhD, BPO(Hons)
- Co-Investigators: Ryan Caldwell, CP**; Thomas Schnitzer, PhD; Kwang-Youn Kim, PhD; Matthew Major, PhD
- Collaborators: Michael Oros, CPO; John Angelico, CPO (Scheck & Siress); Steve Gard, PhD; Marc Applebaum, MD; Rebecca Stine, MS (Jesse Brown VA Medical Center)
- Research Assistants: Lilly Tran, MS; Vasanth Subramanian, MS; Jessica Yohay, BS; Julia Quinlan, PhD
- Consultant: R. J. Garrick, PhD
- Funded by: Department of Defense #W81XWH-15-1-0708
- Status: Completed
We propose a Clinical Trial to compare the new prosthetic socket we developed with an FY09 PRORP Technology Development Award (Proposal #OR090122, Award #W81XWH-10-1-0744) titled, “Development of Sub-Ischial Prosthetic Sockets with Vacuum-Assisted Suspension for Highly Active Persons with Transfemoral Amputations” with the current standard of care socket with the goal of demonstrating objective functional superiority as well as more desirable patient-reported outcome measures. The availability of a more comfortable and functional socket will contribute to improving the quality of life of persons with transfemoral amputation, especially military persons with amputation who are typically young, with excellent premorbid health, and who wish to return to premorbid activity levels, resulting in higher functional expectations.
Study Design
The proposed clinical trial will be an assessor-blinded prospective randomized cross-over trial wherein participants with unilateral transfemoral amputation will be randomized to using one of two socket conditions (i.e., sub-ischial or ischial containment) before crossing over to the other socket condition. Random allocation will be used to assign the initial treatment condition.
The trial will be balanced such that all subjects will receive all treatments (i.e., both socket conditions) and that all subjects will participate for the same number of periods (i.e., two).
The primary aims of the study are:
- To demonstrate if the NU-FlexSIV Socket is more comfortable than the IC socket.
- To demonstrate if the NU-FlexSIV Socket results in better functional performance than the IC socket.
- To demonstrate the NU-FlexSIV Socket will result in better quality of life and “satisfaction with device” (i.e. prosthesis) than the IC socket.
Publications
- Fatone S, Caldwell R, Angelico R, Subramanian V, Stine R (2019) Evaluation of Socket Comfort and Functional Performance for Persons with Transfemoral Amputation: Interim Analysis. Prosthetics and Orthotics International, 43 (1S):73. https://doi.org/10.1177/0309364619883197
- Fatone S, Caldwell R, Stine R, Tran L, Angelico J (2018) “Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation: Interim Results.” Journal of Prosthetics and Orthotics, 30(S2):22.
Presentations
- Caldwell R. (2020) NU Flex-SIV Sub-Ischial Socket Techniques and Research Results. Invited speaker in symposium “Transfemoral socket design in the US and Germany: What is the state of the art?” OT World Congress, virtual meeting, October 27-29, 2020.
- Fatone, S and Caldwell R (2020) Development, Research and Dissemination of the Northwestern University Sub-Ischial Socket Technique. Minneapolis VA Research Service Conference Series, January 14, Minneapolis, MN.
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Socket Technique: Development, Research, and Dissemination. Invited Presentation, AOPQ-AQIPA 2019 Congress, October 18-20, St-Hyacinthe, Quebec, Canada.
- Fatone S (2019) Development and Dissemination of the Northwestern University Flexible Sub-Ischial Socket Technique. Invited presentation, ISPO Canada and RehabWeek, June 24-28, Toronto, Canada.
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Socket Technique: Development, Research, and Dissemination. Invited presentation in the session “Innovations in Socket Design and Manufacturing” at the Orthotic and Prosthetic Innovative Technologies Conference (OPTech), May 16-18, Ann Arbor, Michigan.
- Fatone S (2019) The Northwestern University Flexible Sub-Ischial Vacuum (NU-FlexSIV) Socket: Development, Research and Dissemination. Invited presentation, Iowa Prosthetic, Orthotic and Pedorthic Association, April 6, Des Moines, Iowa.
- Fatone S, Caldwell R, Angelico R, Subramanian V, Stine R (2019) Evaluation of Socket Comfort and Functional Performance for Persons with Transfemoral Amputation: Interim Analysis. International Society for Prosthetics and Orthotics World Congress, October 5-8, Kobe, Hyogo, Japan.
- Fatone S, Caldwell R, Stine R, Subramanian V, Angelico J (2018) Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation. Australian Orthotic and Prosthetic Association, October 4-6, Gold Coast, Australia.
- Fatone S, Caldwell R, Angelico J (2018) Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation: Interim Results. NUPOC Biennial Symposium for Initiative ’93, March 13, Chicago, IL.
- Fatone S, Caldwell R, Angelico J (2018) Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation: Interim Results & Clinical Commentary. Scheck & Siress Education Fest, April 27-28, Lombard, IL.
- Fatone S, Caldwell R, Stine R, Tran L, Angelico J (2018) “Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation: Interim Results.” American Academy of Orthotists & Prosthetists Annual Meeting & Scientific Symposium, February 14-17, 2018, New Orleans, LA.
- Fatone S, Caldwell R, Stine R, Tran L, Angelico J. (2017) Evaluation of the NU-FlexSIV Socket for Persons with Transfemoral Amputation: Interim Results. Midwest Chapter of the American Academy of Orthotists and Prosthetists, November 11, Chicago, IL.
- Fatone S, Caldwell R (2016) Socket-Related Research Collaborations at Northwestern University. Scheck Fair. April 8-9, Lombard, Illinois.
Webinars
- Fatone S (2020) Introduction to the Northwestern University Sub-Ischial Socket Technique (NUFlexSIV and NUFlexSIS). Australian Orthotic and Prosthetic Association, April 30, Online Webinar. https://www.anymeeting.com/857-053-093/EA50D78483463D
Further Development and Evaluation of the Junior Shape&Roll Prosthetic Foot
- Co-Investigators: Edward Grahn, BSME, Dilip Thaker, Kerice-Ahmun Tucker, William Brett Johnson, PhD
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
There are few prosthetic foot options for children with lower limb loss. In low-income areas, there are even fewer options. At the NU-RERC State-of-the-Science Conference in P&O conducted in 2006, Don Shurr, CPO, PT, stated that there are many adult feet, but few "little feet". Also, Mr. Shurr pointed out that it is not clear how prosthetic feet should change as children grow. Our previous RERC-funded studies of roll-over shape led to the development of the Shape&Roll Prosthetic Foot for adults in resource-limited areas. Based on the need for highly functional but low-cost pediatric prosthetic feet around the world, we are continuing our development of the Junior Shape&Roll Prosthetic Foot. During the last cycle of RERC funding, we collected important information on able-bodied children walking that will allow us to build low-cost but biomimetic prosthetic feet for children. Based on the information collected during the last RERC cycle, we have started developing the Junior Shape&Roll Prosthetic Foot. In this work, we finalized the designs for the Junior Shape&Roll Prosthetic Foot (sizes 11cm to 21cm) and disseminated information about how to fabricate it.
Specific Objectives
The objectives of this project are: (1) to finalize the design of the Junior Shape&Roll Prosthetic Foot (sizes 11 to 21 cm); (2) to ensure structural integrity of the feet using mechanical testing machines (modeled after the International Organization of Standardization's document on structural testing of prostheses - ISO 10328); (3) to gather subjective feedback and gait measurements from a small group of pediatric prosthetic foot users; and (4) to transfer the technology to a prosthetics manufacturing company.
Results
The design, fabrication and preliminary mechanical testing of the Shape&Roll Foot Jr. is described in a fabrication manual.
Clinical Implications
Low-cost prosthetic components are especially relevant to the pediatric amputee population because they need to be continuously replaced as the child grows. The successful completion of this project will lead to a low-cost yet highly functional and biomimetic pediatric prosthetic ankle-foot system.
Patent Granted
Hansen A, Childress DS (2010) Prosthetic foot with adjustable flat region. Patent application #US20100030344 A1. https://www.google.com/patents/US20100030344?dq=Prosthetic+foot+with+adjustable+flat+region&hl=en&sa=X&ei=haqRVMHCB46nyASZooLIAw&ved=0CB8Q6AEwAA
Publications
- Tucker K, Johnson WB, Gard S, Fatone S (2014) Fabrication Manual: Shape&Roll Prosthetic Foot Jr. Rehabilitation Engineering Research Center for Prosthetics and Orthotics, Northwestern University Prosthetics-Orthotics Center, Chicago, IL.
Further Development of an Adaptable Prosthetic Ankle Unit
- Co-Project Directors: Steven Gard, PhD, and Matthew Major, PhD
- Co-Investigators: Andrew Hansen, PhD; Stefania Fatone, PhD; Dudley Childress, PhD; Edward Grahn, BSME; Eric Nickel, MS; Brian Ruhe, MS; Rebecca Stine, MS; Dilip Thaker; Sam Kwak; José Luis Zavaleta, BS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
The ability to ambulate on different terrains is a distinct advantage that legged locomotion has over wheeled transportation. However, some of the lower-limb adaptations that able-bodied persons automatically and subconsciously utilize on uneven terrains are not possible with most current lower-limb prostheses, making it difficult for prosthesis users to walk on irregular surfaces. It is not sufficient for the prosthetic foot and ankle to merely bend in order to accommodate the surface inclination, because doing so induces moments in the prosthesis that reduces stance phase stability for the user. Instead, the prosthetic alignment must be modified instantaneously and automatically to provide the user with optimal function during stance phase while walking on slopes. This project will focus on the development and evaluation of a prosthetic foot-ankle mechanism that can adapt (without manual intervention) to different levels of walking surface inclination. This project is a continuation of the project "Development of an Equilibrium-Point Prosthetic Ankle Joint" from the last RERC cycle, which developed 1st generation prototypes of the concept shown in the figure below.
Specific Objectives
Our objectives in this project include continued development and refinement of a 2nd generation prototype mechanism and evaluation of the device on level and non-level terrains. The prototype will be tested against commercially available prosthetic foot and ankle components. Performance goals include similar or superior walking of persons with transtibial amputations when using the prototype as compared to commercially-available prosthetic foot-ankle components on level surfaces, and superior function when using the prototype on inclined and declined surfaces. Performance will be assessed using walking speed, roll-over shapes, gait kinematics and kinetics, and subjective evaluation by the users. Gait measurements will be compared with walking data from able-bodied persons.
Results
Mr. Eric Nickel worked on this project to satisfy requirements for his Master’s Degree at Northwestern University. The purpose of his project was to develop a prototypical prosthetic ankle unit that adapted to sloped surfaces and was sufficiently durable for short-term take-home trials. The prototype that Mr. Nickel developed switched between low and high rotational impedances by means of a wrap spring clutch mechanism. The clutch is held in a disengaged position when unloaded and deflection of a compressible pylon under axial load rotates a control collar and engages the clutch. The prototype was subjected to 100,000 cycles of mechanical endurance testing based on ISO 10328 standards to determine the suitability for two-week take-home testing. Three persons with unilateral transtibial amputations were recruited to test the prototype in the laboratory, providing subjective feedback through a survey and participating in a motion analysis study to confirm the performance of the slope adaptation function. Translation of the ankle moment-angle curves for all subjects along the ankle angle axis demonstrated a change of the ankle alignment when subjects walked with the adaptable ankle on surfaces of different slopes. The ankle moment-angle curves had a lower slope than the subjects’ usual prostheses, and some subjects had distinct flat regions in the moment-angle curves when using the adaptable ankle. The arbors of the clutch demonstrated significant wear when tested to 100,000 cycles based on ISO 10328 standards, yet the adaptable ankle continued to hold testing loads. The alignment change observed for sloped surfaces suggests the prototype was providing slope adaptation. The flat regions on the ankle moment-angle curves suggest the clutch may have been slipping. Refinement of the clutch engagement mechanism and continued development to reduce the weight and size of the prototype is needed prior to take-home testing.
Mr. Samuel Kwak, a student with the Illinois Math and Science Academy (Aurora, IL), performed a case-study analysis of a bilateral transtibial prosthesis user walking with the prototypical mechanism that Mr. Eric Nickel developed for this project. The subject was asked to walk at a self-selected pace across a level surface, and up and down a ramp with a 5° slope using his regular prostheses with non-adapting ankles while gait data were recorded. These data were then compared to data collected while walking with the NUPOC prosthetic ankle. The NUPOC prosthetic ankle provided greater range of motion than the non-adapting ankle in all walking conditions. Motion of the NUPOC prosthetic ankle more closely resembled that of able-bodied individuals, although neither prosthetic ankle provided entirely “normal” motion. Ankle angle-moment data demonstrated the adaptation of the NUPOC prosthetic ankle to inclines and declines by changing the ankle angle during stance while maintaining the ankle moment. This case study suggests that it is possible for persons with bilateral transtibial amputations to benefit from prosthetic ankles that mechanically adapt to changes in ground slope on each step, consistent with results previously reported for persons with unilateral transtibial amputation. More research and development is needed to confirm these possible benefits and to address the performance problems encountered with the current prototype.
Mr. José Luis Zavaleta, an engineering student from Iberoamericana University (Mexico City), began working with Steven Gard and Matthew Major and explored several different mechanical solutions to the problem before developing a physical prototype. The prototype, however, is for illustration purposes only and is not substantial enough for testing on human subjects. José Luis Zavaleta and the research he conducted while at NUPOC were featured in an issue of Domingo. The journal spotlights “The 42 Mexicans of the Future: Science and Education”. (Or copy and paste this address into your browser: http://www.domingoeluniversal.mx/historias/detalle/Los+42+mexicanos+del+futuro%3A+ciencia+y+educaci%C3%B3n-1998.) José's work was also featured in multiple Mexican media outlets, including a Yahoo (Mexico) News article. (Or copy and paste this address into your browser: http://mx.noticias.yahoo.com/dise%C3%B1an-ibero-pr%C3%B3tesis-tobillo-fabricable-18-horas-003600252.html.)
Clinical Implications
The successful development of this product should allow lower limb prosthesis users the ability to more easily and safely traverse sloped surfaces. The adaptability of the ankle-foot system should result in more consistent loading of the residual limb and increased comfort of the prosthesis.
Patent Granted
Hansen, A., Gard, S.A., Childress, D., Ruhe, B., Williams, R. (2013). Equilibrium-Point Prosthetic and Orthotic Ankle-Foot Devices. United States Patent 8,597,369.
Related Presentations and Publications
- Nickel E. Development and Fatigue Testing of a Durable Prosthetic Ankle-Foot Prototype Capable of Adaptation to Sagittal Plane Surface Inclination. Masters Thesis, Evanston IL: Northwestern University; 2010.
- Nickel E, Hansen A, Gard S, editors. Prosthetic ankle-foot system that adapts to sloped surfaces. 10th Design of Medical Devices Conference; 2011 April 12-14; Minneapolis, MN.
- Kwak S, Fatone S. A Case Study Evaluation of a Bilateral Transtibial Prosthesis User Walking with the NUPOC Mechanically Adapting Prosthetic Ankle. Capabilities, 2011, 19(3)6-7.
- Kwak S, Fatone S. Development and evaluation of a prosthetic ankle that mechanically adapts to sloped surfaces. IMSAlloquium Student Investigation Showcase, Illinois Mathematics and Science Academy; April 21, 2011; Aurora, IL.
- Nickel E, Hansen A, Gard S. Prosthetic ankle-foot system that adapts to sloped surfaces. Journal of Medical Devices - Transactions of the ASME. 2012;6:011006-1-6.
Gait Initiation and Termination
- Co-Principal Investigators: Steven Gard, PhD, and Dudley Childress, PhD
- Student Investigator: Steven Miff, PhD
- Co-Investigators: Margrit Meier, PhD; Andrew Hansen, PhD; and Rebecca Stine, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR) of the U.S. Department of Education under Grant No. H133E030030.
- Status: Completed
"Quiet" standing and walking (e.g., at a constant mean velocity) are considered "steady-state" activities, meaning that on average the body is neither accelerating nor decelerating. Various aspects of steady-state walking have been analyzed extensively in an attempt to better understand both healthy and pathological gait. However, human locomotion is not entirely a steady-state progression but rather consists of three components: starting, walking, and stopping. The dynamic processes of starting and stopping are much more complex since the human body needs to accelerate and decelerate, respectively, often in a limited amount of time. As a result, the skills necessary to maintain stability, weight transfer, foot clearance, etc., become more critical during these transition phases than during the steady-state conditions. Such requirements become even more significant in people with a lower-limb amputation, where one or multiple joints are missing. Although a large number of scientific studies have examined the various characteristics of steady-state locomotion, only a limited number have analyzed how a person initiates and terminates gait. The focus of this research is to understand how acceleration and deceleration are achieved during gait initiation and termination, in both able-bodied subjects and in people with lower-limb loss. We hypothesize that the process of gait initiation can be characterized through two distinct patterns: a "passive" initial forward fall, followed by an "active" process that leads to steady-state walking.
Method
Gait initiation, stead-state walking and gait termination were analyzed in ten able-bodied subjects and ten people with unilateral transtibial limb loss for slow, normal, and fast walking speeds. A rocker-based inverted pendulum model was developed and used to simulate gait initiation. The relationships predicted by the model compared favorably with the measured data.
We used kinematic and anthropomorphic data to determine the body center of mass (BCOM) position of each subject. The BCOM acceleration was derived by double-differentiating the position data. An averaged BCOM acceleration was calculated by a filtering of the instantaneous acceleration data at a cutoff frequency set by the cadence for elimination of the step-to-step variation. We used this averaged acceleration to calculate the time the volunteers needed to initiate and terminate gait.
We also examined the effective rocker (roll-over shape) behavior of the knee-ankle-foot (KAF) system during gait initiation, steady-state walking (i.e. constant speed gait), and gait termination. The KAF roll-over shapes were characterized by transforming COP data of the 10 able-bodied subjects from a laboratory-based coordinate system into a leg-based coordinate system. The resulting roll-over shapes (effective rockers) were characterized using a circular arc model.
Results
The results indicate that rapid gait termination is in many aspects a "mirror image" of gait initiation. Both able-bodied ambulators and the subjects with unilateral transtibial limb loss initiate and terminate gait in approximately two steps, regardless of the steady-state walking speed (see figure below). Higher acceleration and deceleration magnitudes account for increasing walking speeds. For gait initiation, the invariant time interval can be explained by the phases of this process. The initial conditions set by the ankle and by trunk lean dictate the magnitude and speed of the passive-like forward fall during the first step. During the second step, additional forward momentum is generated by a push from the trailing leg. Compensations in persons with transtibial amputation appear to occur at the hip.
The KAF roll-over shapes exhibit an overall ''flexed'' orientation during the first step of gait initiation and an ''extended'' orientation during the last step of gait termination. The results suggest that gait initiation begins with a realignment of the effective rocker created by the KAF system (i.e. a planar rotation of the KAF roll-over shape). This ''flexed'' re-alignment moves the COP backwards, encouraging the body to roll forward. During rapid termination, the KAF system creates an ''extended'' effective rocker. This rocker re-alignment moves the COP further in front of the ankle, encouraging the body to stop moving forward.
Related Publications
- Hansen AH, Miff SC, Childress DS, Gard SA, Meier MR. Net external energy of the biologic and prosthetic ankle during gait initiation. Gait Posture. Jan 2010; 31(1):13-17.
- Miff, SC, Hansen, AH, Childress, DS, Gard, SA, and Meier, MR (2008). Roll-over shapes of the able-bodied knee-ankle-foot system during gait initiation, steady-state walking, and gait termination. Gait and Posture, 27:316-322.
- Miff, SC, Childress, DS, Gard, SA, Meier, MR, and Hansen, AH (2005). Temporal symmetries during gait initiation and termination in nondisabled ambulators and in people with unilateral transtibial limb loss. Journal of Rehabilitation Research and Development, 42(2):175-182.
- Miff, S (2004). "Gait Initiation and Termination in Non-Disabled Ambulators and in People with Unilateral Lower Limb Loss," PhD Dissertation, Biomedical Engineering, Northwestern University.
- Miff, S, Childress, DS, Hansen, A, Gard, SA, and Meier, M. (2004). The Behavior of the Knee-Ankle-Foot System During Gait Initiation, Steady State Walking and Gait Termination. 9th Annual Meeting of the Gait and Clinical Movement Analysis Society (CGMAS), Lexington, KY, April 21-24.
- Miff, S, Childress, DS, Hansen, A, Gard, SA, and Meier, M. (2004). Temporal-Spatial Symmetries During Gait Initiation and Termination. 9th Annual Meeting of the Gait and Clinical Movement Analysis Society (CGMAS), Lexington, KY, April 21-24.
- Miff, SC, Childress, DS, Gard, SA, Meier, M, and Hansen, A. (2003). Initiation of Walking: Passive or Active? 8th Annual Meeting of the Gait and Clinical Movement Analysis Society (GCMAS), Wilmington, DE, May 7-10.
Interface Monitoring System to Promote Residual Limb Health
- Co-Principal Investigators: Yonggang Huang and Stefania Fatone, John Rogers (Northwestern University); Todd Coleman (UCSD)
- Co-Investigators: Ryan Caldwell, CP, Lilly Tran, MS, Jessica Yohay, BS
- Consultant: R. J. Garrick, PhD
- Funded by: Eunice Kennedy Shriver National Institute of Child Health & Human Development (NICHD) and National Institute of Biomedical Imaging and Bioengineering (NIBIB) 5R01EB019337
- Status: Completed
This project aimed to develop a stretchable and flexible sensor technology capable of transforming healthcare from reactive and hospital-centered to preventive, proactive, evidence-based, and person-centered. The goal is to offer ‘skin-like’ properties, to enable intimate, complete non-invasive integration with the patient. The resulting ‘epidermal’ electronic devices (Kim, Lu et al. 2011) may allow clinicians to monitor their patients, and the general public to assess, continuously, their health and wellbeing. The proposed interface monitoring system, designed to promote residual limb health in persons who wear prostheses, in physical forms that are skin-like, may demonstrate key technological and scientific advancements towards evidenced-based and person-centered prosthetic care.
The work involved collaboration across three institutions to:
- Develop ‘skin-like’ pressure and temperature sensors, with wireless operation, as well as hydration and blood flow sensors that operate inside a prosthetic socket.
- Develop computational modeling and algorithms for statistical signal processing of the sensor data and pattern recognition to create a user-friendly interface for clinicians and patients.
- Apply the proposed sensor technologies and data processing and pattern recognition techniques to prosthetic clinical practice. The continuous capture, storage and transmission of sensor data are critical to the design of lower limb prosthetics for improved health and healthcare.
The work endeavored to improve health by leading development of new biomedical imaging devices for early detection and prevention of health problems and assessment of health status. In addition to prosthetic care, the proposal may address an unmet need for a model system for individualized healthcare, in which continuous sensing, monitoring and assessment are performed using wireless epidermal sensors instead of traditional lab-based instrumentation.
Project Outcomes
Dr. Fatone’s team conducted focus groups with persons with lower limb amputation and prosthetists to gather ideas regarding possible residual limb monitoring system features. We learnt that stakeholders favored short-term use of a possible system to troubleshoot residual limb problems, with temperature and pressure the most frequently mentioned measurements. Hence, we focused our subsequent system development efforts primarily on temperature and pressure sensing.
Dr. Roger’s team successfully developed a platform for dual wireless protocol operation that consisted of a battery-free NFC sensor unit with two independent channels for simultaneous measurement of pressure and temperature. They also completed a circuit design with an instrumentation amplifier for improved accuracy and stability in operation and wrote a software GUI for data visualization, with real-time graphical display of calibrated pressure and temperature.
In parallel, Dr. Coleman’s team built and optimized an alternative reusable, temperature sensor consisting of a butterfly board with BLE chip. We simulated antenna performance on the body, showcasing that with appropriate resistors, inductors, and/or capacitors, it is operating as we like when placed on 0.5mm encapsulation and further placed on the body. We also confirmed simulation of antenna performance by physically adjusting antenna trace on board and doing appropriate testing.
We made some progress exploring computational modeling and algorithms for statistical signal processing of the sensor data. We were able to build on Dr. Coleman’s expertise and prior work to explore temperature data and established feasibility that we could potentially use it to detect good and poor fit of sockets. We applied the new sensor technologies to the assessment of the residual limb during socket use. We demonstrated that the final version of the NFC sensor system could continuously capture and transmit temperature and pressure data from multiple sites on the residual limb. We demonstrated that the sensors did not cause any skin irritation and that, based on feedback from the user, were unnoticeable. We performed initial studies validating that the new sensors produced data comparable to wired, commercially available systems (thermocouples from Omega Engineering, Norwalk, CT and the pliance system from Novel, Munich, Germany).
Information Resulting from the Research Can Be Shared with Other Investigators
Interested researchers may contact Dr. John Rogers at jrogers@northwestern.edu to request software for the sensors.
References
Kim DH, Lu N, Ma R, Kim YS, Kim RH, Wang S, Wu J, Won SM, Tao H, Islam A, Yu KJ, Kim TI, Chowdhury R, Ying M, Xu L, Li M, Chung HJ, Keum H, McCormick M, Liu P, Zhang YW, Omenetto FG, Huang Y, Coleman T and Rogers JA (2011). "Epidermal electronics." Science 333 (6044): 838-843.
Acknowledgements
NUPOC would like to acknowledge the support of Ottobock in providing two residual limb models for use in this project.
NUPOC would like to thank the prosthetists and prosthesis users who participated in our focus groups for their candid and helpful comments. We also would like to acknowledge research extern, Matthew Quigley, for his invaluable help in preparing for the focus groups. Additionally, we thank Dr. R. J. Garrick for moderating, Piper Kruse for audio recordings, and Linda India for support with catering and administration.
Publications
- Kwak JW, Han M, Xie Z, Chung HU, Lee JY, Avila R, Yohay J, Chen X, Liang C, Patel M, Jung I, Kim J, Namkoong M, Kwon K, Guo X, Ogle C, Grande D, Ryu D, Kim DH, Madhvapathy S, Liu C, Yang DS, Park Y, Caldwell R, Banks A, Xu S, Huang Y, Fatone S, Rogers JA (2020) Wireless sensors for continuous, multimodal measurements at the skin interface with lower limb prostheses. Science Translational Medicine, 12, eabc4327.
- Tran L, Caldwell R, Quigley M, Fatone S (2018) Stakeholder Perspectives for Possible Residual Limb Monitoring System for Persons with Lower-Limb Amputation. Disability and Rehabilitation [Epub ahead of print] Sep 5:1-8. doi: 10.1080/09638288.2018.1492634. PMID: 30182755; PMCID: PMC6401343.
List of other publications arising from this project.
Presentations
2017
- Fatone S, Huang Y, Rogers J, Coleman T (2017) Interface Monitoring System to Promote Residual Limb Health. Ignite Talk and poster at the 2017 NSF Smart and Connected Health (SCH) Principal Investigators Meeting, March 20-22, Boston, MA.
- Caldwell R, Yohay J, Tran L, Chung HU, Jung I, Rogers J, Fatone S (2017) Description of a prototype residual limb monitoring system. NUPOC Biennial Symposium for Initiative ’93, March 13, Chicago, IL.
- Tran L, Caldwell R, Yohay J, Chung HU, Jung I, Rogers J, Fatone S (2017) Description and demonstration of a prototype residual limb monitoring system. Midwest Chapter of the American Academy of Orthotists and Prosthetists, November 11, Chicago, IL.
- Tran L, Han S, Caldwell R, Rogers J, Coleman T, Fatone S (2017) Ability of Epidermal Sensors to Measure Lower-Limb Temperature during Activity with a Prosthesis Simulator. The 43rd Academy Annual Meeting & Scientific Symposium of the American Academy of Orthotists & Prosthetists (AAOP), March 1-4, Chicago, IL.
2016
- Fatone S, Caldwell R (2016) Socket-Related Research Collaborations at Northwestern University. Scheck Fair. April 8-9, Lombard, Illinois.
- Tran L, Caldwell R, Quigley M, Fatone S (2016) Stakeholder Input on a Residual Limb Monitoring System. 42nd American Academy of Orthotists and Prosthetists Annual Meeting & Scientific Symposium, March 9-11, Orlando, FL.
- Tran L, Caldwell R, Quigley M, Fatone S (2016) Stakeholder Input on Development of a Residual Limb Health Monitoring System. NUPOC Biennial Symposium for the German-Speaking Travel Fellows of Initiative ’93, February 25, Chicago, Illinois.
- Tran L, Caldwell R, Quigley M, Fatone S (2016) Stakeholder Input on the Development of a Residual Limb Monitoring System. 12th Annual Lewis Landsberg Research Day, April 7, Northwestern University, Chicago, IL (poster).
- Tran L, Han S, Caldwell R, Rogers J, Coleman T, Fatone S (2016) Ability of epidermal sensors to measure lower limb temperature during activity with a prosthesis simulator. Midwest Chapter of the American Academy of Orthotists and Prosthetists, November 3-5, Rosemont, IL.
2015
- Fatone S, Huang Y, Coleman T, Rogers J, Banks A, Tran L, Caldwell R, Brown D, Pharr M (2015) Interface Monitoring System to Promote Residual Limb Health (poster). 2015 NSF Smart and Connected Health (SCH) Principal Investigators Workshop: Amplifying Discovery through Shared Resources and Defining and Measuring Health Impact in SCH Research, June 30-July 1, 2015, Arlington, VA.
- Fatone S, Huang Y, Rogers J, Coleman T, Tran L (2015) Interface Monitoring System to Promote Residual Limb Health. Ignite Talk at the 2015 NSF Smart and Connected Health (SCH) Principal Investigators Workshop: Amplifying Discovery through Shared Resources and Defining and Measuring Health Impact in SCH Research, June 30-July 1, 2015, Arlington, VA. [Access PDF, see Section #57, pages 115-120.]
- Tran L, Fatone S, Caldwell R (2015) Stakeholder Input on Development of a Residual Limb Health Monitoring System. Midwest Chapter, American Academy of Orthotists and Prosthetists Annual Meeting and Scientific Session, May 27-29, Rosemont, IL.
Related Publications and Presentations
- Rohman M (January 2021) Novel Device Provides Continuous Monitoring of Skin, Prostheses. Northwestern Medicine News Center. https://news.feinberg.northwestern.edu/2021/01/novel-device-provides-continuous-monitoring-of-skin-prostheses/
- Clark V. (March 2017) O&P Research Supports Evidence-based Care. The O&P Edge, 16(3):20-34. http://www.oandp.com/articles/2017-03_01.asp
- Leitner Tammy and Capitanini Lisa. Human Body Merges with Technology in 'Biohacking' Trend, NBC 5, Chicago, IL (Published Monday, Sept. 21, 2015).
Modeling of Able-Bodied and Prosthetic Gait
- Principal Investigators: Dudley S. Childress, PhD, and Steven A. Gard, PhD
- Project Director: Steven A. Gard, PhD
- Co-Investigator: Andrew H. Hansen, PhD
- Student Investigator: Pinata H. Sessoms, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR), Department of Education, Grant # H133E030030
- Status: Completed
There is a need for a firm theoretical foundation for walking in the field of rehabilitation and orthopaedics, because currently the biomechanics of gait are not sufficiently understood to allow quantification. Models and simulations of walking allow us to better understand different aspects of human movement and analyze motion in mathematical terms. Models of varying complexity can be compared to determine how each component in the model contributes to overall gait. Simulations can be run with these models, which are helpful for analyzing new design ideas (e.g., new prosthetic or orthotic components) or when data cannot be acquired experimentally. Some studies we are interested in using models and simulations include: studying the effects of changes in mass distribution in limb segments (i.e., to compare gait of able-bodied persons against those with lower limb amputations), consequences of varying shock absorption capabilities, and the effects of altering gait related parameters such as foot rocker mechanisms, step length or frequency, and kinematic parameters. The purpose of this project is to develop simple walking models for use in simulations of both able-bodied and prosthetic/orthotic gait in order to better understand the mechanics of, and the differences between, numerous gait styles.
Previous Work
There have been many different researchers that have used models to represent various forms of gait, from simple, single segment, inverted pendulum models (e.g., R. Alexander, G. Cavagna, T. McGeer, A. Kuo, J. Donelan, M. Garcia, and A. Ruina) to very complex, three-dimensional, multi-segment, multi-muscle models (e.g., S. Delp, F. Anderson, M. Pandy, L. Gilchrist, and M. Hardt). Early observations of human gait support a rocker representation of the foot [8] that was later defined by Perry [9] as made up of the rolling action of heel, ankle, and forefoot rockers. Addition of a rocker foot to an inverted pendulum model allows the leg to be effectively lengthened during walking [9] and creates more accurate equations relating step length, cadence, walking speed, and vertical excursion of the BCOM [1]. This simple model contradicts some of the original six determinants of gait theory by Saunders and Inman, showing that the vertical excursion of the BCOM is independent of pelvic obliquity [5] and stance-phase knee flexion [6] because these motions occur at a time in which they would not minimize the BCOM vertical excursion. This simple model is also able to predict certain gait parameters for constrained walking (i.e., fixed step length and cadence) which was confirmed with empirical data in our laboratory [2]. Issues with ambulation efficiency (relationships between forward kinetic and gravitational potential energy) have also been explored [7].
Methodology
Second-generation gait models are being developed to further explore theoretical concepts of normal gait. We will incorporate and build upon the rocker based inverted pendulum models that our lab has used to study step length and vertical displacement of the body [1, 2], rocker radius and arc length for ankle-foot roll-over shapes [3]; spring stiffness, damping coefficient, and other factors relating to shock absorption during gait [4, 5, 6]; energy considerations of ambulation [1, 7]; and various leg adaptations to changing environmental conditions during gait [4]. The models will be used to increase understanding o f the scientific and engineering principles of human walking, which will aid in evaluating prosthetic and orthotic components, identifying the functional deficiencies of pathological gait, and designing new prosthetic and orthotic technology.
Second-generation gait models will include the addition of a pelvic link joining the two legs and allowance of rotations about the rocker heel and toe ("pivoting"), which will allow more events of gait to be modelled. These additions are important for modelling the double-support phase of gait (when both feet are in contact with the ground) which is the primary phase of gait where weight is shifted from one leg to the other and when the velocity of the BCOM is redirected from a downward trajectory back upwards for the next step [11]. Being able to model double-support phase may help us to have a better understanding of the energy required for walking and how this differs between able-bodied persons and persons with amputation. The ability to model pivoting will also allow us to determine it's effects on gait which may relate to "drop-off" seen in persons with amputation [12] and also pivoting seen in persons walking fast or taking long step lengths. Initial research in our laboratory indicates that "drop-off" can lead to higher impact forces on the leading limb. Additional components to the model may allow us to better explain certain aspects of walking, and may be added in the future, though more additions also increase the complexity of the model.
These models should provide us with a better understanding of foot-rocker mechanisms, shock absorption of the locomotor mechanism, energy considerations during ambulation, leg adaptations to changing environmental conditions during gait, and the importance of simple measures of walking.
References
- Gard and Childress (2001). What determines the vertical displacement of the body during normal walking? JPO: Journal of Prosthetics and Orthotics 13(3): 64-67.
- Miff et al. (2001). Vertical excursion of the trunk during gait is determined by step length. Gait and Posture 13(3): 258-259.
- Hansen et al. (2000). Prosthetic foot roll-over shapes with implications for alignment of trans-tibial prostheses. Prosthetics and Orthotics International 24(3): 205-215.
- Gard (1995). An investigation of foot clearance issues in normal and above-knee amputee gait. Biomedical Engineering. Evanston, Northwestern University.
- Childress and Gard (1997). Investigation of vertical motion of the human body during normal walking. Gait & Posture, 5(2): 161.
- Gard and Childress (1999). The influence of stance-phase knee flexion on the vertical displacement of the trunk during normal walking. Archives of Physical Medicine & Rehabilitation 80(1): 26-32.
- Miller (2003). Theories of human ambulation with applications to swing-through crutch gait. PhD Dissertation. Biomedical Engineering. Evanston, Northwestern University.
- Holmes (1863). The Human Wheel, Its Spokes and Felloes. The Atlantic Monthly, 11(67):567-580.
- Perry (1992). Gait Analysis: Normal and Pathological Function. Thorofare, NJ, SLACK Incorporated.
- Morawski and Wojcieszak (1978). "Miniwalker - a resonant model of human locomotion." In: Biomechanics VIA Int. Series on Biomechanics, Vol 2A, Proceedings of the 6th Int. Congress of Biomechanics. Edited by Asmussen, E. and Jorgensen, K. Baltimore: University Park Press, pp. 445-451.
- Kuo et al. (2005). Energetic consequences of walking like an inverted pendulum: step-to-step transitions. Exerc Sport Sci Rev 33(2): 88-97.
- Hansen et al (2004). Effects of prosthetic foot roll-over shape arc length on gait of trans-tibial prosthesis users. International Society of Prosthetics and Orthotics 11th World Congress, Wanchai, Hong Kong, Hong Kong National Society of The International Society for Prosthetics and Orthotics.
Pilot Study of the Effect of Socket Characteristics on Coronal Plane Stability during Gait of Persons with Unilateral Transfemoral Amputation
- Project Director: Stefania Fatone, PhD
- Co-Investigator: Rebecca Stine, MS
- Collaborator: Robert Tillges, CPO, Tillges Certified Prosthetics and Orthotics Inc.
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
Results of a survey of the P&O field conducted in 2006 as part of the NU-RERC State of the Science Conference indicated that prosthetists and prosthesis users thought that the socket/interface was the most important area of prosthetics to which research efforts should be directed. Prosthetic sockets form the interface between the residual limb and the prosthesis and are important for the transmission of forces and distribution of pressure. Hence, socket design is important to the overall comfort, control, and function an amputee may have.
There are two basic types of transfemoral prosthetic sockets, the quadrilateral and ischial containment sockets. While the geometry of the quadrilateral socket has been consistently defined, there exist many variations in ischial containment socket design. A recent variant of the ischial contaiment socket design, the Marlo Anatomical Socket (MAS) (see picture) has been proposed and is purported to allow increased range of motion while still providing sufficient control and stability during gait. In the MAS, more aggressive containment of the ischial ramus medially (via the medial 'ear') is coupled with lower anterior and posterior trim lines than previous iterations of the ischial containment socket. Despite the proliferation of different transfemoral prosthetic socket designs, there is limited objective analysis available of their effect on the biomechanics of the gait of persons with transfemoral amputation. One area of debate is the ability of transfemoral prosthetic sockets to provide coronal plane stability during gait. Two features of ischial containment socket design are thought to contribute to coronal plane stability. The first is appropriate containment of the ischium and ischial ramus. The second, relies in part on the soft tissue, especially the adductors located medially, being compressed to increase stiffness. The well-defined geometry of the MAS socket provides an ideal tool to investigate the contribution of these features of socket design to coronal plane stability. Therefore, the purpose of this pilot study is to use the MAS socket to investigate the contribution of ramal containment and soft tissue compression on coronal plane stability of the pelvis and transverse plane motion of the prosthetic limb during gait in persons with unilateral transfemoral amputation.
Method
The test socket used in this study was a copy of the subjects' current MAS that included a removable medial 'ear' and removable medial panels that allowed for randomized alterations in socket configuration during gait analysis. Three soft-tissue compression conditions were tested: high, medium and low, with the high compression condition representing recommended clinical practice.
Gait analysis was conducted on a single day. Subjects walked at a comfortable self-selected speed in 6 socket conditions in random order: (1) intact MAS; (2) MAS with one medial panel removed; (3) MAS with both medial panels removed; (4) MAS with medial 'ear' removed and both panels in place; (5) MAS with medial 'ear' and the first panel removed; and (6) MAS with medial 'ear' and both panels removed.
We recorded Socket Comfort Score (0 represents the most uncomfortable socket fit imaginable and 10 represents the most comfortable socket fit) (Hanspal et al. 2003), walking speed, step width, coronal plane hip moments, lateral trunk lean in prosthetic stance for each socket condition. Comfort and stability were expected to decrease incrementally from sockets 1 to 6.
Results
Six subjects were assessed. We found a strong relationship between comfort and changes in containment and tissue loading such that with the ischium contained, tissue loading did not influence socket comfort. With no containment, the socket was equally comfortable with high tissue loading but comfort decreased significantly with less tissue loading. The gait variables assessed were invariant to changes in containment and/or tissue loading (Fatone et al., in press).
References
- Hanspal, R. S., K. Fisher, et al. (2003). "Prosthetic socket fit comfort score." Disability and Rehabilitation 25(22): 1278-1280.
Publications and Presentations
- Fatone S, Dillon M, Stine R, Tillges R. (2014) Coronal plane stability during gait in persons with unilateral transfemoral amputation: a pilot study. Journal of Rehabilitation Research and Development 51(8)1217-1228.
- Fatone S, Dillon M, Stine R, Tillges R (2015) Coronal plane socket stability during gait in persons with transfemoral amputation: Pilot study. World Congress of the International Society for Prosthetics and Orthotics, June 22-25, Lyon, France. Prosthetics and Orthotics International, 39(Supplement 2):317. DOI number: 10.1177/0309364615591101.
- Garrick RJ and Fatone S. "Marlo Anatomical Socket Studied for Coronal Plane Stability." Capabilities 21(1)1-2, winter 2013.
- Fatone S, Stine R, Tillges R. (2013) Effect of socket characteristics on coronal plane stability during gait in persons with unilateral transfemoral amputation. 39th Academy Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 20-23, Orlando, Florida.
- Fatone S, Stine R, Tillges R. (2013) Effect of socket characteristics on coronal plane stability during gait in persons with unilateral transfemoral amputation. Midwest Chapter of the American Academy of Orthotists and Prosthetists, May 30-June 1, Lake Geneva, Wisconsin.
Pilot Study: Application of Roll-Over Shape toward Evaluation and Design of Partial Foot Prostheses
- Principal Investigators: Dudley S. Childress, PhD and Steven A. Gard, PhD
- Project Director: Andrew H. Hansen, PhD
- Co-Investigators: Stefania Fatone, PhD, BPO(Hons); Rebecca L. Stine, MS; and Kerice A. Tucker, BS,
Northwestern University; Robert D. Lipschutz, CP, Rehabilitation Institute of Chicago; Michael Dillon, PhD, La Trobe University, Australia; Scheck and Siress Prosthetics, Orthotics and Pedorthics - Student Investigator: Pinata H. Sessoms, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
A partial foot (PF) amputation, in theory, should be superior to a transtibial or Symes amputation because the physiologic ankle joint is preserved. Persons with PF amputations should generally be able to walk without their prosthesis, if only to walk to and from the toilet during the night. The remaining ankle and subtalar joints in cases of toe and transmetatarsal amputations (TMAs), should allow these persons to more readily adapt to different terrains compared to more proximal amputations (e.g. Lisfranc and Chopart), where the ankle and subtalar joints are lost or compromised. The decision to mechanically limit ankle joint motion may be based on many factors including the need to reduce forces acting on the distal end of the residuum, inability to transfer the remaining ankle motion to the device in a short PF amputation, or to insure suspension of the device. In cases of short PF amputations such as Chopart, the ankle joint may be surgically fused to provide stability for the remaining foot bones. While in theory a PF amputation should be more advantageous than a transtibial amputation, the walking performance on level ground of persons with PF prostheses is often reduced in comparison with the performance of persons using transtibial prostheses. This is due in part to problems with the tolerance of the residual foot to weight-bearing forces and difficulties with the fitting and performance of P&O devices. We believe that roll-over shape principles, which we have established from our examination of non-disabled walking, can be used to enhance the understanding of a range of currently utilized PF prostheses-orthoses. We also believe that roll-over shape can be used to design highly functional devices for persons with PF loss.
Related Presentations and Publications
- Dillon MP, Fatone S, Hansen AH. Effect of prosthetic design on center of pressure excursion in partial foot prostheses. J Rehabil Res Dev. 2011;48(2):161-78. Epub 2011/04/12.
- Dillon M, Fatone S, Hansen A, editors. Effect of prosthetic design on centre of pressure excursion in partial foot prostheses. Annual Scientific Meeting of the International Society for Prosthetics and Orthotics, Australian National Member Society; 2011 November 3-5; Dockside, Cockle Bay Wharf, Sydney, Australia.
- Dillon, M., Hansen, A. and Fatone, S. (2008). Influence of marker models on ankle kinematics in persons with partial foot amputation: an investigation using a mechanical model. Journal of Rehabilitation Research & Development, 45(4): 567-576.
- Dillon, M., Hansen, A. and Fatone, S. (2008). Influence of marker models on ankle kinematics in persons with partial foot amputation: an investigation using a mechanical model. Journal of Rehabilitation Research & Development, 45(4): 567-576.
- Hansen A.H., Dillon, M.P. and Fatone, S. (2008) Model Simulations of Partial Foot Amputation Gait While Wearing Shoes or Below-Ankle Devices with Respect to Marker Placement and Increased Dorsiflexion. Capabilities, 16(2):1-4. Northwestern University, Chicago, IL.
- Fatone, S. (2007). Studies of the Biomechanics of Gait of Persons with Partial Foot Amputation. Capabilities, 15(4):3-4. Northwestern University, Chicago, IL.
- Hansen, A., Dillon, M. and Fatone, S. (2008). Source of Increased Dorsiflexion During Gait of Persons with Partial Foot Amputations when Shod or in 'Below-Ankle' Devices. Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 27 - March 1, Orlando, FL.
- Sessoms, P., Fatone, S. and Hansen, A. (2008). Case Study: Gait Analyses of Persons with Partial Foot Amputation Walking Barefoot and With Dorsiflexion Stop Ankle Foot Orthoses. Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 27 - March 1, Orlando, FL.
- Fatone, S. (2008). Biomechanics of Ambulation after Partial Foot Amputation: A Systematic Literature Review. Invited Speaker in: Hafner B and Fatone S. Evidence Reports: Findings from the SSC on Biomechanics of Ambulation after Partial Foot Amputation (Instructional Course). Annual Meeting and Scientific Symposium of the American Academy of Orthotists and Prosthetists, February 27 - March 1, Orlando, FL.
- Dillon, M., Fatone, S., Hodge, M. (2007). Biomechanics of Ambulation after Partial Foot Amputation: Systematic Review. In: Symposium―Management of the Partial Foot Amputee. Invited Speaker, 12th World Congress of the International Society for Prosthetics and Orthotics, July 29 to August 30, Vancouver, BC, Canada.
- Dillon, M., Fatone, S., and Hodge, MC. (2007). Biomechanics of Ambulation after Partial Foot Amputation. Journal of Prosthetics and Orthotics, 19:(8 Proceedings):P2-P61.
Pilot Study: Junior Shape&Roll Prosthetic Foot for Children
- Principal Investigators: Dudley S. Childress, PhD, and Steven A. Gard, PhD
- Project Director: Andrew H. Hansen, PhD
- Co-Investigators: Margrit R. Meier, PhD; Steven A. Steer, MS; Edward C. Grahn, BSME; Rebecca L. Stine, MS; and Dilip Thaker
- Collaborators: Children's Memorial Hospital, Chicago, Illinois
Shrine Hospital for Children, Chicago, Illinois
Texas Scottish Rite Hospital for Children, Dallas, Texas - Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
At present, most children's prosthesis components are scaled-down versions of the devices that were engineered with adult requirements in mind. However, the little data that are available suggest that children have distinctive features, different from adults that should be taken into account when designing prosthetic components [1-2]. The number of prosthetic feet designed specifically for the need of children is small in industrialized countries and almost non-existent in low-income countries. Thus, there is a need for highly functional and inexpensive prosthetic feet that can be easily customized for the specific biomechanical requirements of children. In this study, we are examining the roll-over shapes of the ankle-foot systems of non-disabled children and will use the results to design a prosthetic foot that takes the specific biomechanical requirements of children into account.
Methodology
Walking data (stripped of identifiers) will be gathered from existing databases at other centers including Children's Memorial Hospital in Chicago and the Shrine Hospital for Children in Chicago. These data will be processed as described previously [3] to obtain ankle-foot roll-over shapes of able-bodied children. The roll-over shapes will be fitted with circular arcs to determine their best-fit radii. These radii will then be used to design prosthetic feet that are appropriate for children depending on their height, weight, and age, using similar design principles as for the adult Shape&Roll prosthetic foot. The design methodology assumes that the ideal roll-over shape for a prosthetic foot is that of an able-bodied ankle-foot system.
Results
Children's Memorial Hospital in Chicago has shared walking data on sixteen children ranging in age from four to seventeen years. More data will be collected and processed before results are reported.
References
- Schneider et al. (1993) J Biomech 26(10): 1191-1204.[2] Sutherland et al. (1988) The development of mature walking. Mac Keith Press, Oxford Blackwell Scientific Publications Ltd. Philadelphia, USA.[3] Hansen et al. (2004) Clin Biomech 19(4): 407-414.
Related Publications
- Hansen AH, Meier MR. Roll-over shapes of the ankle-foot and knee-ankle-foot systems of able-bodied children. Clin Biomech (Bristol, Avon). Dec 14 2010; 25:248-255.
- Hansen A, Meier M, Childress D. Roll-over Shape Radii of Able-bodied Children. Paper presented at: 12th World Congress of the International Society for Prosthetics and Orthotics; July 29-August 3, 2007; Vancouver, Canada.
Roll-over Shape Concept
The basic premise of the roll-over shape measurement can be illustrated using a simple rolling wheel (see Figure 1). As the wheel rolls it utilizes a series of contact points. These points, if measured in a world-based coordinate system, are in a straight line on the rolling surface (see Figure 1A). If these same contact points are measured relative to a coordinate system fixed on the wheel (i.e. a wheel-based coordinate system), the points indicate the rolling geometry or cam-shape of the wheel (see Figure 1B) . In the example of the rolling wheel, the wheel is rigid and the shape could easily be found instead by direct measurement of the wheel (e.g. tracing the outline of the wheel onto a piece of paper). However, the strength of this methodology is that it can be applied to a deformable object (e.g. a prosthetic foot) or a system comprised of deformable objects as well as active and passive mechanical linkages (e.g. a non-disabled ankle-foot system) to determine the effective rocker geometry that the combined effects of the system conform to create. In the case of deformable objects, the contact is often over a surface and not at one point only. However, the effective rocker geometry can be estimated by using the center of pressure of force as the contact point, the point that represents the net effect of the distributed pressure on the contact surface.

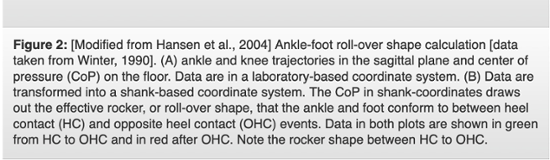
To find the roll-over shape of the ankle-foot system, for example, we transform center of pressure data from a laboratory coordinate system into a shank-based coordinate system (see Figure 2) . The shank-based coordinate system is based on the ankle and knee markers and lies in the sagittal plane (newer measurements place the coordinate axes within a plane defined by the long axis of the foot and a line connecting the ankle and knee centers). This concept can be extended to three-dimensions to estimate effective rolling surfaces.
The roll-over shape is not a literal shape. In other words, the system does not conform to the complete roll-over shape at any one point in time (unless it is completely rigid like the wheel). Rather the shape is developed throughout the stance portion of the walking cycle. Figure 3 shows the average ankle-foot roll-over shape from 24 able-bodied subjects walking between 1.2 and 1.6 meters/second (Hansen et al., 2004).
References
Hansen, A., Childress, D., Knox, E. (2004) Roll-over Shapes of Human Locomotor Systems: Effects of Walking Speed. Clinical Biomechanics, Vol. 19, No. 4, 407-414.
Winter D., 1990. Biomechanics and Motor Control of Human Movement. Jon Wiley and Sons, Inc., Toronto.
Shape&Roll Prosthetic Foot Designer Kit for Low-Income Countries
- Principal Investigators: Steven A. Gard, PhD, and Dudley S. Childress, PhD
- Project Director: Margrit R. Meier, PhD
- Co-Investigator: Andrew H. Hansen, PhD
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR)
- Status: Completed
The purpose of this project is to design instruction manuals that allow people from low-income countries to fabricate the newly developed Shape&Roll Prosthetic Foot by themselves. Low-income countries require a large quantity of prosthetic components in order to satisfy their demand. However, importing components from industrialized countries is expensive and, in most cases, not affordable on a large scale. Furthermore, these components, designed for the culture of industrialized nations, do not necessarily meet the physical, environmental and social demands of persons living in low-income countries. Disadvantaged countries must cope not only with a large number of citizens with amputations, but also with an almost chronic lack of educated personnel to provide needed prosthetic and orthotic services. In 1990, WHO estimated the number of adequately trained personnel in the orthopedic sector to be less than 2,000. The combined populations of Africa, Asia and Latin America represent more than four billion persons, requiring more than 20,000 trained personnel in order to make available one person per each 1,000 persons who need orthopedic devices (WHO 1990). One solution for the population that needs orthopedic appliances and relies on an insufficient number of trained personnel is the development of P&O components that can be manufactured by personnel who are not trained in P&O. These instruction booklets provide easy to follow, step-by-step instructions for the fabrication of the Shape&Roll prosthetic foot, including the fabrication of its mold and a cosmetic cover. The Shape&Roll prosthetic foot has been developed in our laboratory in collaboration with CIR (Center for International Rehabilitation, Chicago). The instruction booklets are drawn like the modular assembly booklets used by IKEA (see Figure) to make the fabrication process understandable throughout diverse languages and cultures. It is our hope that these instruction booklets will enable personnel who work in orthopedic production facilities, but who are not necessarily trained in P&O, to fabricate the Shape&Roll foot by themselves.
Shape&Roll Prosthetic Foot Instruction Manuals: **
- Shape&Roll Prosthetic Foot Manual 1 - Fabrication of a Lever Compression Mold Meier MR, Steer SA, Hansen AH, Sam M, Childress DS (2006). Shape&Roll Prosthetic Foot Manual 1-Fabrication of a Lever Compression Mold. SpectraGraphics Printing Inc., La Crosse, WI, ISBN: 0-9785898-0-7.
- Shape&Roll Prosthetic Foot Manual 2 - Fabrication of the Core Meier MR, Steer SA, Hansen AH, Sam M, Childress DS (2006). Shape&Roll Prosthetic Foot Manual 2-Fabrication of the Core. SpectraGraphics Printing Inc., La Crosse, WI, ISBN: 0-9785898-1-5.
- Shape&Roll Prosthetic Foot Manual 3 - Fabrication of the Cosmetic Shell Hansen AH, Meier MR, Steer SA, Sam M, Dussud S, Wu Y, Childress DS (Unpublished paper, 2008).
NOTE: Updated Manuals Below. These new manuals use cement molds, instead of wood, in a newly designed molding machine. We would like to thank Daniela Duran for translating steps 1 to 3 into Spanish.
- Step 1: Construction of a Shape&Roll prosthetic foot molding machine (new design) (Spanish Translation)
- Step 2: Making a cement upper molding surface (Spanish Translation)
- Step 3: Making a cement tray (Spanish Translation)
- Step 4: Making a Shape&Roll foot -- Use the manual entitled "Shape&Roll Prosthetic Foot Manual 2 - Fabrication of the Core" to learn how to make a foot using the newly designed molding machine with cement molds. The only change is that you do not need to apply soap to the cement molding surfaces like with the wood molds.
- (** These documents are in the Adobe PDF format. You will need the Adobe Reader, which is available for FREE, to view these documents.)
Reference
- WHO (1990) Guidelines for training personnel in developing countries for prosthetic and orthotic services. Geneva World Health Organization.
Related Publications
- Meier M, Steer S, Hansen A, Sam M, Childress D. Shape&Roll Prosthetic Foot: Instruction Manuals. Paper presented at: 12th World Congress of the International Society for Prosthetics and Orthotics; July 29-August 3, 2007; Vancouver, Canada.
Shape&Roll Prosthetic Foot for Use in Low-Income Countries
- Principal Investigator: Dudley Childress, PhD
- Project Director: Andrew Hansen, PhD
- Co-Investigators: Margrit Meier, PhD, CPO; Steven Steer, MS
- Funded by: National Institute on Disability and Rehabilitation Research (NIDRR) sub-contract with the Center for International Rehabilitation (CIR)
- Status: Completed
The Shape&Roll Prosthetic Foot is a low-cost prosthetic component intended for use in low-income countries. The goal of our work is a prosthetic foot with excellent performance in walking that is extremely durable, cosmetically pleasing and inexpensive. In addition we have developed simple tooling for the manufacture of the foot and its cosmetic cover. The process for manufacturing and fitting the foot will be made available at no cost to all interested parties.
Methodology
Our examination of roll-over shapes of prosthetic and able-bodied ankle-foot systems suggests that "high-performance" prosthetic feet conform to effective rockers that are similar to those taken by biologic ankle-foot systems during walking (Hansen et al., 2000; Hansen et al., 2004). Our study of a sample of the prosthetic feet from low-income countries has shown that their roll-over shapes are not similar to those of the able-bodied ankle-foot system (Sam et al., 2004A). The physiologic ankle-foot roll-over shape seems to be an appropriate goal for the design of a prosthetic foot since this component frequently replaces the function of the missing foot and ankle. For this reason, the Shape&Roll Prosthetic Foot was designed to mimic the roll-over shape of the physiologic ankle foot system.
The Shape&Roll foot is manufactured using simple, low-cost technologies (e.g. compression molding of co-polymer plastic, sawing, and drilling) and can be easily customized to the height, weight, and foot length of the user. A compression mold was created that makes use of a type two lever (see Figure 1). Once built, no additional tools are needed to operate the compression mold and the mold itself is the tool for removing the mandrel. Since wood is a thermal insulator, the plastic cools down slowly preventing internal stresses and warpage. The molding surfaces are end grain for added strength in compression during molding and tension during extraction. Common bar soap works as a parting agent between the mold and the copolymer plastic material used to make the foot.
The compression-molding device is used to create a "blank" foot that can be customized for right and left feet of various sizes. Figure 2 outlines the remainder of the process for creating a Shape&Roll prosthetic foot core. We have determined that two molding configurations can be used to create eight sizes of prosthetic feet. With a smaller molding surface and inner mandrel, feet can be made ranging between 22 and 25 cm. Using a larger mold and mandrel, feet can be made from sizes 26 to 29 cm. Molds have been created and tested for both sets of sizes and the complete line of feet is currently in production.
Our initial investigations of the Shape and Roll foot have included (1) Fatigue testing in our laboratory**, (2) Clinical testing in our laboratory**, (3) Clinical testing in El Salvador**, and (4) Roll-over shape testing in our laboratory.
(** These documents are in the Adobe PDF format. You will need the Adobe Reader, which is available for FREE, to view these documents.)
Roll-over shape measurements in our laboratory verify that the Shape&Roll foot conforms to an effective rocker that closely matches that of the physiologic ankle-foot roll-over shape (see Figure 3).
Related Publications
- Hansen, A.H., Childress, D.S., Knox, E.H. (2000) Prosthetic Foot Roll-over Shapes with Implications for Alignment of Trans-tibial Prostheses. Prosthetics and Orthotics International, Vol. 24, No. 3, 205-215.
- Hansen, A., Childress, D., Knox, E. (2004) Roll-over Shapes of Human Locomotor Systems: Effects of Walking Speed. Clinical Biomechanics, Vol. 19, No. 4, 407-414.
- Sam, M., Hansen, A., Childress, D. (2004A) Characterization of Prosthetic Feet Used in Low-Income Countries. Prosthetics and Orthotics International, Vol. 28, 132-140.
- Sam, M., Childress, D., Hansen, A., Meier, M., Lambla, S., Grahn, E., Rolock, J. (2004B) The Shape&Roll Prosthetic Foot (Part I): Design and Development of Appropriate Technology for Low-Income Countries. Medicine Conflict and Survival, Vol. 20, No. 4, 294-306.
- Meier, M., Sam, M., Hansen, A., Childress, D. (2004) The Shape&Roll Prosthetic Foot (Part II): Field Testing in El Salvador. Medicine Conflict and Survival, Vol. 20, No. 4, 307-325.
- Childress, D., Sam, M., Hansen, A., Meier, M., Lambla, S., Grahn, E., Rolock, J., Knox, E. (2004) The Shape&Roll Prosthetic Foot. 11th World Congress of the International Society for Prosthetics and Orthotics, presented by Childress in Hong Kong, China, August 1-6. Meier, M., Sam, M., Hansen, A., Childress, D. (2004) The Shape&Roll Prosthetic Foot: Field Testing in El Salvador. 11th World Congress of the International Society for Prosthetics and Orthotics, presented by Meier in Hong Kong, China, August 1-6.
Study of Residual Limb/Prosthetic Socket Compliance in Transtibial Amputees
- Principal Investigator: Steven A. Gard, PhD
- Student Investigator: Erin Boutwell, MS
- Co-Investigators: Andrew Hansen, PhD; Rebecca Stine, MS; Kerice Tucker, BS
- Funded by: Department of Veterans Affairs; National Science Foundation Graduate Research Fellowship
- Status: Completed
Shock absorption is a critical consideration for lower-limb prosthesis users. The able-bodied locomotor system is capable of providing effective shock absorption through compression of soft tissues, kinematic adaptations in the lower limb and pelvis, and eccentric muscle contractions. In individuals with a transtibial amputation, the structure of the residual limb has been drastically altered, and many of the mechanisms utilized by able-bodied individuals are either no longer present or compromised by the amputation. Thus, the prosthetic limb must incorporate appropriate shock absorption to promote comfort and reduce pain arising from large impact forces during gait.
As a result, many prosthetic components have been designed or updated to assist in restoring shock absorption to the prosthetic-side limb. These components include energy-storage-and-return (ESAR) feet and shock-absorbing pylons. The effect of these shock-absorbing prosthetic components has been investigated to assess their influence on walking speed, energy consumption, and ground reaction forces, but no consistent difference related to shock absorption has been documented for any intervention type. One hypothesis is that the compliance of the components is much lower than that of the soft tissue within the residual limb-prosthetic socket interface. Thus, the soft tissue compresses more substantially during loading and thereby dictates the overall compliance of the limb.
The mechanical interaction between the prosthetic socket and the residual limb should be further examined to analyze the contribution of residual limb soft tissue to total limb compliance. One way to accomplish this objective is to introduce additional compliance at the limb-socket interface. If the low stiffness of the residual limb soft tissue is driving the compliance of the prosthetic-side limb, then reducing the stiffness further by introducing a thick gel liner may result in considerable changes to overall limb compliance and the shock-absorbing capacity of the prosthetic-side limb.
Methods
The effect of compliance at the residual limb-prosthetic socket interface was tested using two thicknesses of gel liner. Eleven subjects with unilateral transtibial amputation participated in a walking and a loading protocol while wearing one of two liners: a thin 3mm liner and a thick 9mm liner. The relative displacement of the socket from the residual limb and a quasi-stiffness measurement of the liner were determined from a coronal-plane side-to-side loading experiment. Subjects also participated in a gait evaluation at slow, normal, and fast freely selected walking speeds; temporal-spatial, kinematic, kinetic, and intrasocket pressure data were acquired and analyzed.
Results
Subjects were divided into three categories: bony residual limbs (BRLs, n=5), average residual limbs (ARLs, n=1), and padded residual limbs (PRLs, n=5). A decreased peak pressure found over the fibular head was significant (p = 0.01). The temporal-spatial data exhibited little difference between the two liner thicknesses for the BRL group, while the PRL group experienced an increase in walking speed (p = 0.04) and a decrease in prosthetic-side stance phase duration (p = 0.01) with the 9mm liner. No differences between the two liners were found in stance-phase knee flexion or prosthetic-side pelvic obliquity range of motion, both of which are anatomical shock-absorbing mechanisms. An overall increase in vertical ground reaction force peaks were found (p = 0.02), but no other kinetic changes were noted. A small and statistically insignificant reduction in quasi-stiffness was observed with the 9mm liner.
PRL subjects may be more accustomed to compliance at the limb-socket interface and may therefore be able to take advantage of the compliance offered by the 9mm liner. While BRL subjects indicated a reduction of pain with the 9mm liner, their unaltered gait parameters may suggest a perception of instability associated with more relative motion between the socket and the limb. It was concluded that the greater compliance afforded by the 9mm liner may allow increased comfort within the limb-socket interface through redistribution of peak pressures in persons with bony residual limbs, while individuals with padded residual limbs may benefit from a thicker liner depending on activity level and limb physiology.
Related Publications
- Boutwell E, Stine R, Hansen AH, Tucker K, and Gard SA. (2012) "Effect of Prosthetic Gel Liner Thickness on Gait Biomechanics and Pressure Distribution within the Transtibial Socket." Journal of Rehabilitation Research & Development. 49(2): 227-240.
- Gard SA, Boutwell EV, Stine RL, Hansen AH, and Tucker KA. (2010) "Study of Residual Limb/Prosthetic Socket Compliance in Transtibial Amputees." International Society for Prosthetics and Orthotics (ISPO) 13th World Congress. May 10-15. Leipzig, Germany.
- Boutwell E, Stine R, Hansen AH, Tucker K, and Gard SA. (2010) "Study of Residual Limb-Prosthetic Socket Compliance in Transtibial Amputees." American Academy of Orthotists and Prosthetists (AAOP) Annual Meeting & Scientific Symposium. February 24-27. Chicago, IL.
- Boutwell E. (2009) "Study of Residual Limb/Prosthetic Socket Compliance in Transtibial Amputees." Annual Summer Symposium of the Midwest Chapter American Academy of Orthotists and Prosthetists (AAOP). June 12-13. Lake Geneva, WI.
- Stine R, Hansen AH, Tucker K, Boutwell E, and Gard S. (2008) "A Preliminary Study of the Effects of Gel Liner Thickness on In-Socket Residual Limb Pressures in Trans-tibial Prosthesis Users." (Poster) 11th EMED Scientific Meeting (ESM). July 28-30. Dundee, Scotland, UK.
The Effect of Increased Prosthetic Ankle Motion on the Gait of Persons with Bilateral Transtibial Amputations
- Principal Investigator: Steven A. Gard, PhD
- Student Investigator: Po-Fu Su, MS
- Co-Investigators: Robert Lipschutz, CP and Todd Kuiken, MD, PhD, Rehabilitation Institute of Chicago
- Funded by: National Institute of Child Health and Human Development (NICHD)
- Status: Completed
Increased ankle motion appears to improve the gait of persons with unilateral transtibial (TT) amputation, but the improvements are limited and inconsistent between studies [1,2]. The purpose of the study is to determine if the provision of prosthetic ankle motion in persons with bilateral TT amputations significantly improves their walking performance. The subjects in the study were divided into two groups based on etiology. The TRA group has their amputations due to trauma and the PVD group has their amputations due to peripheral vascular diseases. Comparisons of gait characteristics were made between the PVD and TRA groups, and with data from able-bodied (AB) subjects.
Clinical Significance
Analyzing the effects of increased prosthetic ankle motions in persons with bilateral TT amputations enables us to better identify the advantages and disadvantages of the prosthetic components because there are no compensatory actions from a sound leg. Our results may provide information for improving design of prosthetic ankles and feet, and help establish guidelines for prosthetists fitting persons with lower limb amputation.
Methodology
Data were collected from 12 people with bilateral TT amputations. The average age of the six TRA subjects was 45.7 years old and was 66.0 years old for the six PVD subjects. There were four phases in the study, each lasting a minimum of two weeks. Initially, subjects were fitted with Seattle LightFoot2 and walked with them for two weeks prior to the baseline gait analysis. Afterwards, subjects were randomly fitted with either the Endolite Multiflex Ankles (flexion unit) or Otto Bock Torsion Adapters (torsion unit) for the 2nd phase. Claimed by the manufacturer, the flexion unit mainly provides plantarflexion/dorsiflexion movement and the torsion unit provides up to 20° of internal and external rotations.
Subjects returned two weeks later for the 2nd gait analysis, after which they were fitted with the second set of ankle components. The protocol was repeated for the 3rd phase of the study. In the 4th phase, all the subjects walked with both of the ankle components. Three different freely-selected walking speeds were recorded. At the end of each gait analysis, questionnaires were administered to the research subjects to record their perceptions of walking with the different prosthetic configurations. Statistical analysis utilized a repeated measures with a factorial design comprising three walking speeds, four ankle configurations with one between subjects factor.
Results
The freely-selected walking speeds of the PVD were about 0.65 m/s compared to 1.05 m/s of the TRA group. When they walked at comparable speeds, the PVD and TRA groups displayed similar gait characteristics. The subjects exhibited symmetrical gait. The walking speeds, cadences and step lengths were not significantly different when the TT subjects walking with the four different ankle configurations. The TT subjects walking with the flexion unit had significantly greater sagittal plane ankle range of motion (see Figure 1). The torsion unit also significantly increased the transverse plane ankle range of motion (see Figure 2). However, the increased ankle motions did not significantly change the rotations of the knee, hip or pelvis. The flexion unit significantly increased the peak fore and aft ground reaction force (GRF) while the vertical GRF remained unchanged. Kinetics results also illustrated that walking with the flexion unit decreased the ankle moments, and increased the ankle power generation and absorption. However, the kinetics of the knee and hip were not affected by the different ankle configurations. From the results of the questionnaires, the TT subjects indicated that they liked the flexion and the torsion units about the same, but they preferred the combination of the two from among all the ankle configurations. Specifically, subjects indicated that the flexion unit was beneficial for going up/down stairs and inclines while the torsion unit assisted turning.
Discussion
The flexion unit increased both plantarflexion during the loading response phase of the gait and dorsiflexion during pre-swing. The TRA group even had greater sagittal ankle motion than the AB subjects at their freely-selected and fast speed. The increased dorsiflexion prior to toe-off decreased the distance between the GRF vector and the ankle joint center, resulting in smaller peak plantarflexor moments. The flexion unit also increased the energy storage/return at the ankle, which was reflected in greater ankle power absorption and generation. Although the torsion unit significantly increased the transverse plane ankle motion, the amount of increase was on average only about 1°. It was possible that the manufacturer's recommended setting of the stiffness of the torsion adaptor was too high. Another possible explanation was that TT subjects may have felt unstable walking with greater ankle transverse rotation, as they either adopted a walking pattern to avoid increased ankle transverse rotation or they requested the prosthetist adjust the torsion unit to be stiffer. Also, the increased ankle motion may not be used much for straight, level walking. Gait analysis on different floor conditions, or when the TT subjects performed task like turning, may further illustrate the advantage of the increased ankle motions.
References
- Hafner, B., et al. (2002). Clinical Biomechanics, 17, 125-344.[2] Lehmann, F., et al (1993). Arch Phy Med Rehabl, 74,1225-3.
Related Presentations and Publications
- Gard S, Su P, Lipschutz R, Hansen A. Effect of prosthetic ankle units on roll-over shape characteristics during walking in persons with bilateral transtibial amputations. J Rehabil Res Dev. 2011;48(9):1037-48.
- Gard S, Hansen A, Su P, editors. The effect of prosthetic ankle units on rollover shape characteristics during walking in persons with bilateral transtibial amputations. American Academy of Orthotists & Prosthetists 37th Academy Annual Meeting and Scientific Symposium; 2011 March 16-19; Orlando, FL.
- Su P-F, Gard SA, Lipschutz RD, Kuiken TA. The Effects of Increased Prosthetic Ankle Motions on the Gait of Persons with Bilateral Transtibial Amputations. American Journal of Physical Medicine & Rehabilitation. 2010; 89(1):34-47.
- Gard S, Su P, Lipschutz R, Kuiken T. The Effect of Prosthetic Ankle Units on the Gait of Persons with Bilateral Transtibial Amputations. Paper presented at: 13th ISPO World Congress; May 10-15, 2010; Leipzig, Germany.
- Su P, Gard S, Lipschutz R, Kuiken T. Differences in gait characteristics between persons with bilateral transtibial amputations, due to peripheral vascular disease and trauma and able-bodied ambulators. Archives of Physical and Medical Rehabilitation. 2008; 89(7):1386-1394.
- Su P, Gard S, Lipschutz R, Kuiken T. Gait characteristics of persons with bilateral transtibial amputations. Journal of Rehabilitation Research and Development. 2007; 44(4):491-501.